XiaoMi-AI文件搜索系统
World File Search System合成环境
扩展人工智能以支持数字战争游戏决策
• JP 5-0:在合成环境中表示冲突或竞争,人们在其中做出决策并对这些决策的后果做出反应 • McHugh:根据预定的规则、数据和程序,对冲突局势的选定方面进行模拟 • Caffrey:战争游戏涉及人类玩家或演员在人工竞赛环境中做出决策,然后承担其行为的后果 • Perla:战争模型或模拟,其操作不涉及实际军事力量的活动,其事件序列会影响并反过来受到代表对立双方的玩家所做决策的影响
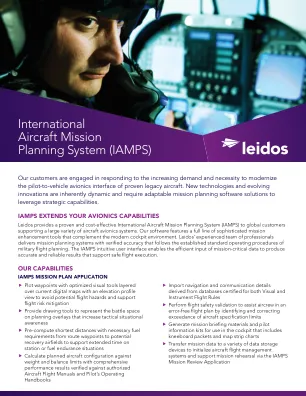
国际飞机任务规划系统 (IAMPS) - Leidos
f 支持在 2D/3D 视图中进行任务演练,通过真实的飞行预览显示地图上的位置,并从飞行员的角度在 3D 合成环境中描绘飞机 f 审查从 IAMPS 任务计划应用程序导入的计划任务,以协调任务程序和目标行动 f 通过记录的航空电子数据流中的深入、明确细节进行行动后审查,以在最佳回忆间隔内提供关键反馈 f 将记录的飞机位置、驾驶舱视频和飞行音频与从 IAMPS 任务计划应用程序导入的规划数据进行比较,以交互方式分析执行情况与飞行计划 f 使用同步显示器同时重建多架飞机的飞行,通过空中机动精确跟踪相对位置
主任论坛 - 当今国防部的建模和仿真
为了支持这些复杂的任务,模型、LVC 模拟以及支持硬件、软件和数据库通常被集成在一起,以在战略、任务或交战层面上产生复杂的合成环境,用于分析、实验和训练;或者将它们集成在一起进行高保真、基于物理的模拟,用于设计、测试和分析组件、子系统和系统性能。无论哪种情况,标准化都是模型和系统之间智能和准确交换数据的关键。标准使物理接口、数据交换的语法级别以及更深层次的“概念”或“语义”级别实现互操作性,以促进有意义的信息交换。虽然我们在前两者方面相当熟练,但要完全实现高度可靠和一致的互操作性,仍有许多工作要做。
北约工业咨询小组(NIAG)...
计划在未来的海上运营环境中扮演几个不同的角色。通过一系列发展活动,包括合成环境建模,物理测试和评估以及操作经验,这些系统的特征和好处正变得越来越充分理解。早期活动已经确定了与使用VTOL UAS系统在海上应用中使用有关的许多挑战领域。这些似乎是由于普遍缺乏技术成熟度和与海事特定要求有关的理解。拟议的研究将确定海上VTOL UAS开发和实施的主要挑战。这项活动将寻求了解必须解决的特定流派方面,以便允许对海上VTOL UAS功能的广泛和强大的采用。北约2级和3类UAS,但在适当的情况下也可以考虑1类UAS。

对在符号多步推理任务上训练的变压器的机械分析
变压器在一系列推理基准上表现出令人印象深刻的表现。评估这些能力是实际推理的结果的程度,现有工作重点是为行为研究开发复杂的基准标记。然而,这些研究并未提供有关推动观察到的capabilies的间隔机制的见解。为了提高我们对变形金刚之间机制的理解,我们对经过合成推理任务的跨前者进行了全面的机械分析。我们确定了模型用于解决任务的一组可解释机制,并使用相关性和因果关系来验证我们的发现。我们的结果表明,它实现了与并行操作的深度结合的复发机制,并存储中间的导致所选令牌位置。我们预计,我们在合成环境中确定的主题可以为变形金刚的更广泛的操作原理提供宝贵的见解,从而为理解更多的复合模型提供了基础。1
国际飞机任务规划系统 (IAMPS) - Leidos
ff 支持在 2D/3D 视图中进行任务演练,通过真实的飞行预览显示地图上的位置,并从飞行员的角度在 3D 合成环境中描绘飞机 ff 审查从 IAMPS 任务计划应用程序导入的计划任务,以协调任务程序和目标行动 ff 通过记录的航空电子数据流中的深入、明确细节进行行动后审查,以在最佳回忆间隔内提供关键反馈 ff 将记录的飞机位置、驾驶舱视频和飞行音频与从 IAMPS 任务计划应用程序导入的规划数据进行比较,以交互方式分析执行情况与飞行计划 ff 使用同步显示器同时重建多架飞机的飞行,通过空中机动精确跟踪相对位置
国防人工智能战略 - GOV.UK
为了应对这些挑战,国防必须优先考虑研究、开发和试验,通过利用创新概念和尖端技术进步保持战略优势——人工智能是国防现代化必不可少的技术之一。想象一下,一名士兵在前线接受高度发达的合成环境中训练,由便携式指挥和控制设备指导,分析和推荐不同的行动方案,由数据库捕获和处理数百架小型无人机拍摄数千小时的最新信息。想象一下,自主补给系统和战斗车辆,在不危及人民的情况下更有效地运送补给和物资。想象一下,最新的定向能武器使用闪电般的目标检测算法来保护我们的船只,而支持这一切的数字主干使用人工智能来识别和防御网络威胁。

基于软件的网络的量子弹性
Houtan Houshmand 博士是富士通的首席技术官研究主管。Houtan 在 IT 架构和系统设计方面拥有 35 年的经验,并在多个联盟内开展了超过 13 年的研究合作。Houtan 一直是态势感知、运营物流决策支持、信息知识管理系统和企业架构能力等主题的广泛研究项目的技术负责人和贡献者。他的专业和兴趣是多模态代理系统,具有神经符号 AI 知识表示和图形网络中的 ML,包括强化学习、数据中心安全 (DCS)、基于逻辑的推理和概率决策模型、合成环境建模和模拟驱动的优化。Houtan 是富士通杰出工程师,拥有曼彻斯特大学计算机网络建模和性能分析博士学位。

RoboTHOR:一个开放的仿真到现实具象人工智能平台
视觉识别生态系统(例如 ImageNet、Pascal、COCO)在现代计算机视觉的发展中发挥了不可否认的作用。我们认为,在这些生态系统出现之前,交互式和具身视觉 AI 已经达到了与视觉识别类似的发展阶段。最近,各种合成环境已被引入以促进具身 AI 的研究。尽管取得了这些进展,但在模拟中训练的模型如何很好地推广到现实这个关键问题仍然基本上没有答案。为模拟到现实的具身 AI 创建一个可比的生态系统提出了许多挑战:(1)问题固有的交互性,(2)现实世界和模拟世界之间需要紧密结合,(3)复制可重复实验的物理条件的难度,(4)以及相关成本。在本文中,我们引入了 R OBO THOR 来使交互式和具身视觉 AI 的研究民主化。 R OBO THOR 提供模拟环境框架