XiaoMi-AI文件搜索系统
World File Search System后方
文图罗起重机
钻井公司 - 为水井或水力压裂相关公司提供服务。根据公司不同,这些公司将使用各种尺寸的起重机来拾取井套管和管道。墓碑/纪念碑公司 - 非常普遍地使用 ET 起重机来设置墓碑,起重机通常面向平板卡车的后方,安装在中心。建筑材料配送和建筑安装公司 - 非常普遍地使用各种类型的起重机来将花岗岩台面/屋顶材料、55 加仑的化学品桶或大箱产品装载到工地。用于将设备装上卡车和卸下卡车的各种起重机,例如混凝土整理机和景观振动板机,通常可承载 200-300 磅。车队服务公司/道路承包商等。- 几乎所有公司都为车队配备了机械服务卡车。工厂/休闲和工业船坞/河流公司 - 工厂和工业场所通常主要使用 ET 或桅杆起重机。任何与水有关的事物都将使用 ET 和 HT 起重机将便携式码头或小型船只放入和取出水中。
机组人员颈部疼痛预防和管理 - NATO STO
第 2 章 — 机组人员颈部疼痛的流行病学、定义和操作影响 2.1 流行病学 2-1 2.1.1 普通人群中的颈部疼痛 2-1 2.1.2 航空中的颈部疼痛 2-2 2.2 操作因素 2-3 2.2.1 颈部疼痛和飞机类型 2-3 2.2.2 高性能固定翼飞机中的颈部疼痛和损伤 2-3 2.2.3 高速喷气式飞机机组人员的颈部疼痛模式 2-6 2.2.3.1 急性损伤 2-6 2.2.3.2 急性损伤的长期影响 2-7 2.2.4 高性能战斗机文献摘要 2-8 2.2.5 固定翼运输飞机中的颈部疼痛和损伤 2-9 2.2.6直升机中的疼痛和损伤 2-9 2.2.6.1 后方机组人员问题 2-11 2.2.6.2 长期影响 2-11 2.2.6.3 直升机文献摘要 2-12 2.3 机组人员颈部疼痛定义 2-12 2.3.1 定义疼痛 2-12 2.3.2 定义颈部疼痛 2-12 2.3.3 定义慢性疼痛 2-12 2.3.4 飞行相关颈部疼痛 2-13

商业航空运输定位飞行中,驾驶舱内冒烟、紧急下降和在低空飞行禁区飞行
05:47:55 ,当飞机经过 FL 180 时,两名机组人员闻到一股强烈的烧焦味。几秒钟之内,浓烟从后方涌入驾驶舱。机长接管驾驶舱并命令戴上面罩 (3)。在此过程中,他的眼镜和通话耳机不见了。由于烟雾太浓,他找不到眼镜,于是戴上了备用的眼镜。两名飞行员都没有戴上防护镜。机长于 05:48:19 将两个动力杆置于怠速位置。六秒钟后 ,“左发动机油压”音频警告响起 (4) 。机长立即启动紧急下降,飞机逐渐俯仰 15° 。左发动机的油温从 05:48:43 开始升高。与此同时,副驾驶通知管制员紧急下降,然后发出 PAN PAN 呼叫 。副驾驶随后指向发动机 1 刻度盘。巴黎 ACC 管制员确认了下降消息,但没有收到 PAN PAN 消息,因为当时另一名机组人员也在该频率上通话。管制员及其协调员随后确保 F-HCIC 与从巴黎奥利机场出发并向西飞行的冲突航班分离。

斯托宁顿镇保护委员会
b. 城镇开发和提案审查 1. PZ2213SD Brandon & Cynthia Flack – 9 块开放空间开发 (OSD) 的细分申请。物业位于南安圭拉路,帕卡塔克。评估员地图 49,街区 2,地块 1。区域 GBR-130。Brandon Flack 描述了拟议的开放空间细分 (OSD),基于 8 块地的传统细分,一些前地有狭窄的“小巷”,将正面与建筑工地连接起来。21.3 英亩的 OSD 开放空间位于后方,保护地役权沿着正面延伸,但允许车道路缘切割;只有 2 个地块会共用一个车道。弗莱克先生表示,他们打算将这片空地捐赠给斯托宁顿土地信托或阿瓦隆尼亚土地保护协会,Eversource 尚未在 2021 年 10 月修复电线,如果电线被废弃,那么电线通行权可能会成为一条良好的公共自行车道,无论是在这里还是在其他地产上。动议:保护委员会支持开放空间设计,而不是传统的分区(Michael Schefers、RaéVen Kelly Dinwoodie)。全票通过。
神经接口对感觉运动 1 恢复的功效......
图 2 。皮质电极的手术植入。(A)进行清醒刺激映射以确定植入位置。在刺激期间导致言语停止的区域(深蓝色)后方确定了额下回 (IFG) 的非言语区域(深蓝色条纹)。通过刺激期间各个手指上感知到的感觉报告(红色、橙色、浅蓝色、紫色)来定位初级体感皮质的手部区域。选定的植入阵列位置以黑色方块表示。(B)大脑中植入电极的位置,叠加在术前结构 MRI 上。S1 阵列针对(A)中的食指和无名指尖位置。M1 阵列直接放置在中央沟上,针对手部和手臂区域。 IFG 阵列瞄准 44 区边界和腹侧运动前区 (PMv) 皮质,145 而 AIP 阵列瞄准顶叶和中央后沟的内侧交界处。C) 阵列基座 146 位置的 CT 图像以及与植入阵列相关的电缆。(D) 术后愈合的阵列基座出口部位的图像,带 147 和不带盖帽(系统不使用时就位)。148
培训与评估大纲报告 - Army.mil
条件:民事 (CA) 公司 (CO) 接到命令建立民事军事行动中心 (CMOC)。通信、行政、后勤、情报和后方安全机制可从受援单位或有机单位获得。所有有机设备均已配备。平民、统一行动伙伴以及当地和国际媒体都在该地区。此任务可以在所有环境条件下执行。该公司正在动态和复杂的作战环境 (OE) 中开展行动,以应对可能包括以下一项或多项的混合威胁:外国情报服务;常规;非常规;游击战、恐怖分子、信息战、网络或其他类型的威胁。此任务的一些迭代应在 MOPP 4 中执行。标准:公司在可以促进军事力量和统一行动伙伴与非军事和民事实体之间持续无缝集成、协调和同步的位置建立 CMOC,根据指挥官的作战计划。CMOC 按照单位标准操作程序 (SOP)、ATP 3-57.70 和 FM 3-57 不迟于 OPORD/FRAGO 中规定的时间实现全面作战能力 (FOC)。注意:此任务的领导者是指挥官、一级军士、作战 NCOIC 和作战军官。实弹:否
实施保护优先列表 - 美国陆军
免责声明:陆军经验教训中心 (CALL) 提供专业信息,但本文表达的观点为作者的观点,而非国防部或其下属机构的观点。内容不一定反映美国陆军的官方立场,也不会改变或取代其他美国陆军官方出版物中的任何信息。作者对其所提供材料的准确性和来源文件负责。2022 年 4 月 4 日至 13 日,加州国民警卫队第 40 步兵师 (40ID) 参加了在德克萨斯州胡德堡举行的战士演习 (WFX) 22-4 指挥所演习。WFX 为 40ID 提供了工具和信心,使其能够在年底执行 WFX,并在 2023 年进行后续动员。在 WFX 期间与陆军第三军合作,使 40ID 工作人员能够巩固流程,同时创新新方法,将移动和机动与保障和保护作战功能同步。该师的保护小组在同步不同的作战功能方面发挥着重要作用。保护小组负责保护部署或位于师级作战区域内的与任务相关的军事和非军事人员、设备、设施、信息和基础设施的有效性和生存能力。40ID 的后方指挥所 (RCP) 使用保护优先级列表 (PPL) 作为中央规划产品,以同步接下来 72-96 小时内师级后方区域的所有行动。RCP 的参谋规划人员在空中任务命令 (ATO) 框架内组织 PPL,火力作战功能使用该框架来规划空中支援、间接火力和陆军航空攻击。同步行动使 RCP 能够最大限度地利用师级机动增强旅 (MEB) 的有限资源,这是一个多功能旅总部,旨在更有效地指挥和控制来自多个组织的部队,执行任务以支持区域行动。最大限度地提高 MEB 的效率有助于扩大作战范围,同时限制部队 (RTF) 的风险。将 PPL 集成到 ATO 周期中可以进行彻底的参谋分析和协调,以最大限度地利用资源,同时使师参谋能够在决定性行动期间评估任务风险 (RTM)。“关键路径”是许多陆军参谋人员用来描述关键产品和会议的逻辑顺序和嵌套的术语,这些产品和会议有助于指挥官做出决策。师参谋人员投入大量时间来确定其组织的具体关键路径,以便其指挥官做出最佳决策。RCP 维持同步、运输工作组、维护工作组和保护工作组使参谋规划人员能够管理各个层级的信息,扩大作战范围并管理 RTM。

电子通讯
过去三个月,斯莱戈大学医院有八名患者接受了日间髋关节置换手术。该手术采用直接前侧肌肉保留微创方法,斯莱戈大学医院目前是爱尔兰唯一一家采用该技术提供当日髋关节置换手术的公立医院。6 月份,斯莱戈大学医院引入了直接前侧微创髋关节置换手术方法,该方法为患者带来了诸多益处。患者疼痛减轻、恢复更快、住院时间更短、术中失血更少、术后活动能力更强。与传统髋关节置换手术相比,这项新技术显著缩短了康复时间,使患者能够快速恢复正常生活,恢复无痛生活。斯莱戈大学医院骨科顾问医生 John Kelly 解释了该技术:“在传统的髋关节置换方法中,外科医生会从髋关节的侧面或后方进入髋关节,为了置换关节,需要切割和分离大肌肉群。

绿色能源和传感器系统卓越中心印度工程科学技术学院,shibpur完整课程结构和
模块1:太阳能单元1半导体和连接的基础,P-N连接的I-V特征。太阳能电池结构,发光电流,光IV特性,太阳能电池参数,光谱响应和量子效率,串联电阻的影响和分流电阻对太阳能电池I-V特性的影响,温度和光强度的影响,阴影的影响,阴影的影响,损失,太阳能细胞中的损失。模块2:半导体中太阳能Cell-2生成重组的基本面; Shockley,阅读和大厅表达;表面和界面重组; Schockley-Queissser效率模块的极限-3:硅太阳能电池的生产,丝网印刷太阳能电池,掩埋的接触太阳能电池,高效率太阳能电池,后方接触太阳能电池。模块4:太阳能电池生产线硅源材料,晶片,清洁,纹理,扩散,等离子体隔离,抗反射涂层,屏幕上打印的前后触点,测试和模块制造模块5:测试和测量量的测试和测量量,测量太阳能电池效率,外部量子效率,IM量度,IM量度(EQE),i QE效率(EQE),EQE,EQE效率,EQE效率,EQE效率,EQE效率,EQE效率,EQE效率,EQE效率(EQE)量子效率分析,终生测量
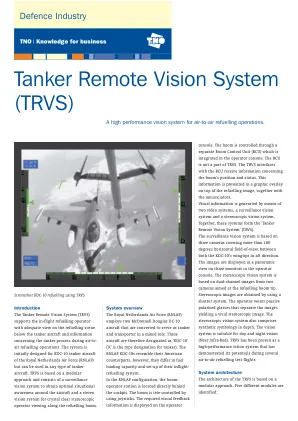
油罐车远程视觉系统
控制台。吊杆通过集成在操作员控制台中的单独吊杆控制单元 (BCU) 进行控制。BCU 不是 TRVS 的一部分。TRVS 与 BCU 接口接收有关吊杆位置和状态的信息。此信息与信号器一起显示在加油图像顶部的图形叠加层中。视觉信息通过两个视频系统、一个监视视觉系统和一个立体视觉系统生成。这些系统共同构成了“加油机远程视觉系统”(TRVS)。监视视觉系统基于三个摄像头,覆盖超过 180 度的水平视野,位于 KDC-10 的两个翼尖之间,在后方。图像以全景视图显示在操作员控制台的三个监视器上。立体视觉系统基于两个瞄准加油杆尖端的摄像机的双通道图像。立体图像是通过使用快门系统获得的。操作员佩戴被动偏光眼镜,将图像分开,从而产生生动的立体图像。立体视觉系统还包括深度合成符号。该视觉系统适用于白天和夜间视觉(近红外)。TRVS 已被证明是一种高性能视觉系统,已在多次空对空加油试飞中展示了其潜力