机构名称:
¥ 1.0
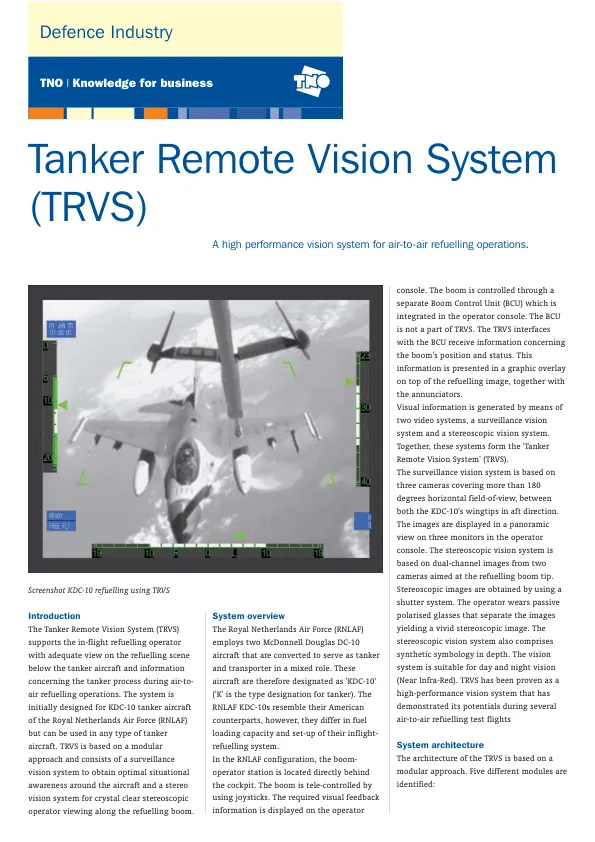
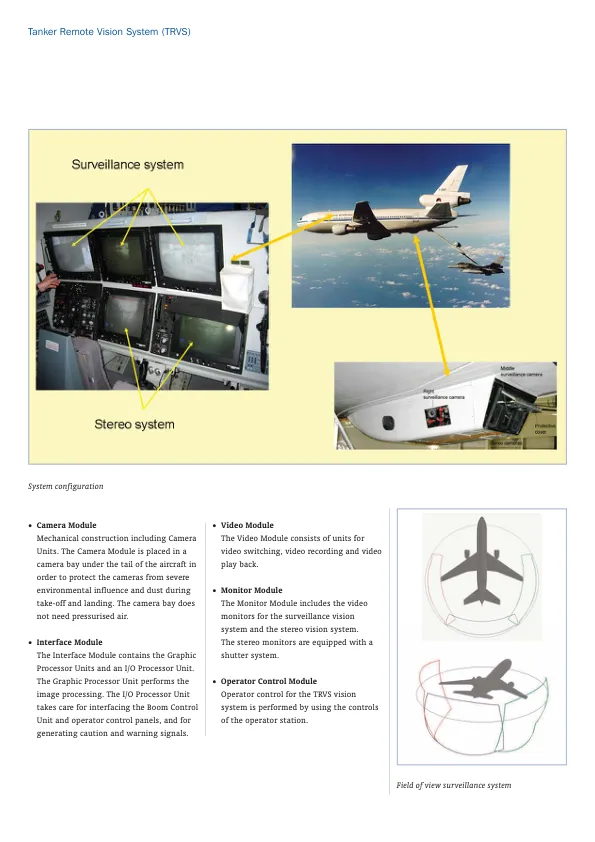
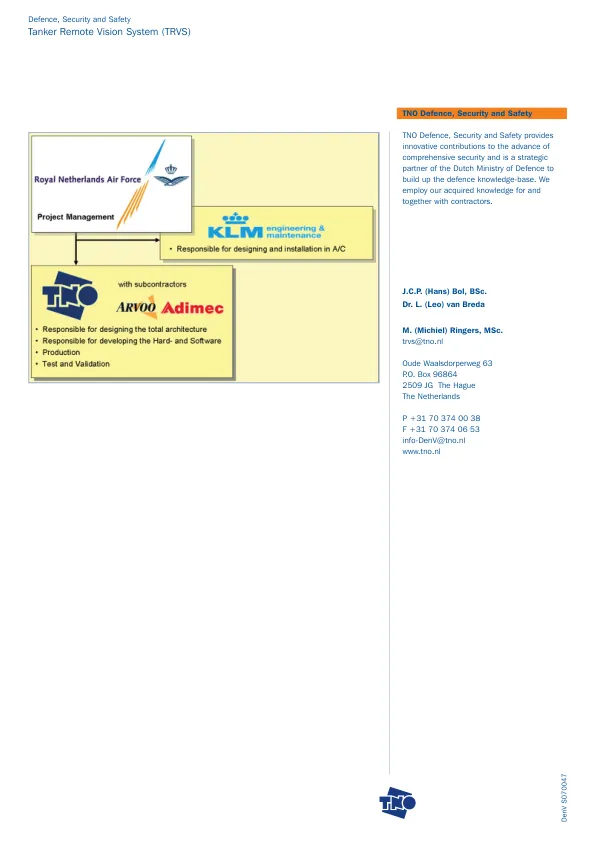
控制台。吊杆通过集成在操作员控制台中的单独吊杆控制单元 (BCU) 进行控制。BCU 不是 TRVS 的一部分。TRVS 与 BCU 接口接收有关吊杆位置和状态的信息。此信息与信号器一起显示在加油图像顶部的图形叠加层中。视觉信息通过两个视频系统、一个监视视觉系统和一个立体视觉系统生成。这些系统共同构成了“加油机远程视觉系统”(TRVS)。监视视觉系统基于三个摄像头,覆盖超过 180 度的水平视野,位于 KDC-10 的两个翼尖之间,在后方。图像以全景视图显示在操作员控制台的三个监视器上。立体视觉系统基于两个瞄准加油杆尖端的摄像机的双通道图像。立体图像是通过使用快门系统获得的。操作员佩戴被动偏光眼镜,将图像分开,从而产生生动的立体图像。立体视觉系统还包括深度合成符号。该视觉系统适用于白天和夜间视觉(近红外)。TRVS 已被证明是一种高性能视觉系统,已在多次空对空加油试飞中展示了其潜力
油罐车远程视觉系统
主要关键词

相关文件推荐