机构名称:
¥ 2.0
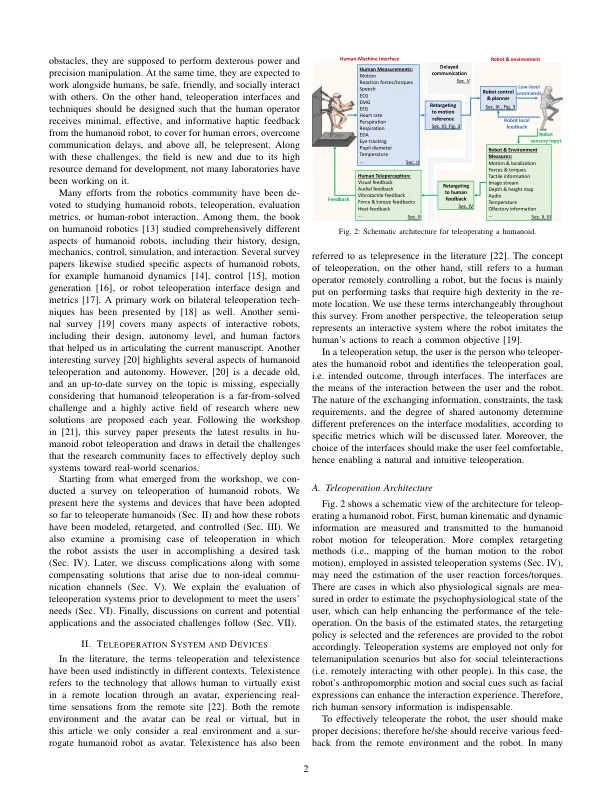
摘要 — 人形机器人的远程操作可以将人类的认知技能和领域专业知识与人形机器人的物理能力相结合。人形机器人的操作多功能性使其成为在远程环境中进行远程操作时广泛应用的理想平台。然而,人形机器人的复杂性给远程操作带来了挑战,特别是在通信有限的非结构化动态环境中。在过去的几十年里,这一领域取得了许多进展,但仍然缺乏全面的概述。本综述论文对人形机器人远程操作进行了广泛的概述,介绍了远程操作系统的总体架构并分析了不同的组件。我们还讨论了该主题的不同方面,包括技术和方法的进步,以及潜在的应用。该论文的网络版本可在 https://humanoid-teleoperation.github.io/ 找到。
人形机器人的远程操作:一项调查 - arXiv
主要关键词




相关文件推荐