XiaoMi-AI文件搜索系统
World File Search System后端

参考解决方案研讨会 材料科学对功率半导体行业日益增长的重要性 2023 年 2 月 16 日,下午 15:30-17:00
Peter Imrich 博士在奥地利莱奥本大学获得材料科学博士学位,研究方向为微纳米机械材料行为。他于 2015 年加入英飞凌,担任金属化专家,专注于所有英飞凌前端技术以及与后端处理的交互。自 2021 年起,他领导位于奥地利菲拉赫的 KAI 汽车和工业电子能力中心的材料科学与模拟小组。

编译前如何选择量子编译器和量子计算机
摘要:未来,量子计算机可能比传统计算机更快地解决特定问题。但它们的实际量子位数很少,错误率很高。然而,量子计算机已经在各个领域得到应用,云提供商提供的量子计算机数量也在稳步增加。要执行量子电路,需要将其映射到量子计算机的硬件上。由此产生的编译电路会严重影响执行的精度,因为会使用量子位和量子门导致错误发生。因此,选择最佳的电路至关重要。SDK 用于实现电路,并且在支持的云提供商和编程语言方面有所不同。这些差异使对其他后端的更改变得复杂。在之前的工作中,我们开发了一个自动化框架来翻译给定的电路并使用多个编译器在可用的量子计算机上对其进行编译。编译结果可以按优先级排序并执行。然而,使用所有编译器和量子计算机进行翻译和编译都是资源密集型的,并且无法很好地扩展到未来的其他后端。因此,我们提出了一种扩展,可以根据用户的需求自动选择合适的编译器和量子计算机组合,例如,缩短等待时间并根据过去的执行情况获得精确的结果。为了演示和验证我们的方法,我们展示了一个原型和案例研究。

基于事件的结构 - 轨道 - CVF Open Access
事件传感器提供高时间分辨率的视觉感应,这使其非常适合感知快速视觉效果,而不会遭受运动模糊的困扰。机器人技术和基于视觉的导航中的某些应用需要3D感知在静态相机前进行圆形或旋转的物体,例如恢复对象的速度和形状。设置等于用轨道摄像头观察静态对象。在本文中,我们提出了基于事件的结构 - 轨道(ESFO),其目的是同时重建从静态事件摄像头观察到的快速旋转对象的3D结构,并恢复相机的等效轨道运动。我们的贡献是三重的:由于最新的事件特征跟踪器无法处理由于旋转运动而导致的定期自我遮挡,因此我们根据时空聚类和数据关联开发了一种新颖的事件特征跟踪器,可以更好地跟踪事件数据中有效特征的螺旋螺旋传播。然后将特征轨道馈送到我们的新颖因素基于图形的结构后端端,该结构从后端进行计算轨道运动插曲(例如自旋速率,相对旋转轴),从而最大程度地减少了重新投影误差。进行评估,我们在旋转运动下生成了一个新事件数据集。比较与地面真理表示ESFO的功效。

新闻稿 | botario 接管 ROBO-AI
作为收购的一部分,botario 将接管 ROBO-AI 的所有技术资产,并将其部分集成到 botario 平台中。当前的 ROBO-AI 客户将迁移到 botario,由于两个平台都在后端使用开源聊天机器人软件 Rasa,因此预计不会出现任何问题。Two Impulse 将继续为客户提供支持,其经验丰富的对话式 AI 团队将在葡萄牙、西班牙和瑞士独家销售 botario 平台。
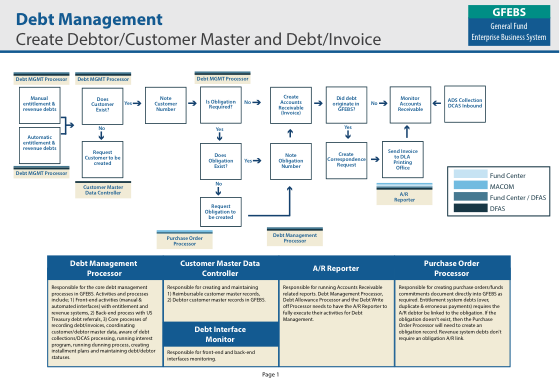
债务管理创建债务人/客户主数据和债务/发票
负责 GFEBS 中的核心债务管理流程。活动和流程包括:1) 授权和收入系统的前端活动(手动和自动界面);2) 美国财政部债务转介的后端流程;3) 记录债务/发票、协调客户/债务人主数据、了解债务催收/DCAS 处理、运行利息计划、运行催款流程、创建分期付款计划和维护债务/债务人状态的核心流程。

SIGNAL 2023 年夏季
先进探索与科学系统通信能力 (ACCESS) 项目是近太空网络的重要服务提供商,负责运营和维护政府所有、承包商运营的地面和飞行系统。今年夏天,Brooke Ballhaus 和 Tarun Narahari 开发了用于 ACCESS 地面调制解调器的自动生成测试报告功能。为了开发他们的前端和后端软件,Ballhaus 和 Narahari 首先研究了能够支持动态报告修改的 Python 编码策略和软件包。除了创建这些测试报告所需的模板和函数之外,Ballhaus 和 Narahari 还确保模板是可修改的,并且能够根据测试数据自动生成图形和表格。后端软件完成后,团队构建了一个图形用户界面 (GUI),使 ACCESS 工程师能够轻松理解和使用 ACCESS 调制解调器测试套件 (AMTS) 的功能。 AMTS 允许 NASA 工程师对任何 ACCESS 地面调制解调器进行高保真性能测试,而该团队的 GUI 支持用户功能,可轻松高效地创建和修改测试报告。Ballhaus 和 Narahari 的软件标准化了生成调制解调器测试报告的过程,从而确保 ACCESS 调制解调器团队能够轻松观察其系统的运行状况和行为。他们的工作使 NASA 能够优化工程师围绕调制解调器做出的决策。

VITRON:用于理解的统一像素级视觉 LLM......
我们提出了 V ITRON,一种通用的像素级视觉 LLM,旨在全面理解、生成、分割和编辑静态图像和动态视频。V ITRON 建立在 LLM 主干之上,在其前端模块中集成了用于图像、视频和像素级区域视觉效果的编码器,同时采用最先进的视觉专家作为其后端,通过它 V ITRON 支持一系列视觉端任务,涵盖从低级到高级的视觉理解到视觉生成。为了确保从 LLM 到后端模块的消息传递有效和精确以进行函数调用,我们提出了一种新颖的混合方法,同时集成离散文本指令和连续信号嵌入。此外,我们为 V ITRON 设计了各种像素级时空视觉语言对齐学习,以达到最佳的细粒度视觉能力。最后,建议使用跨任务协同模块来学习最大化任务不变的细粒度视觉特征,增强不同视觉任务之间的协同作用。 V ITRON 演示了 12 多个视觉任务,并在 22 个数据集上进行了评估,展示了其在四个主要视觉任务集群中的广泛能力。总体而言,这项工作阐明了开发更统一的多模态通才的巨大潜力。
通过滚动曲线在大规模点云中的全局本地化...
摘要 - 由于LiDar,Camera和IMU之间的固有互补性,最近对激光 - 视觉惯性大满贯付出了越来越多的努力。但是,现有方法在两个方面受到限制。首先,在前端,它们通常采用离散的时间表示,需要高精度硬件/软件同步,并基于几何激光功能,从而导致稳健性和可扩展性低。第二,在后端,视觉循环限制遭受了规模的歧义和点云的稀疏性,扫描到扫描环的检测恶化。To solve these problems, for the front-end, we propose a continuous-time laser-visual-inertial odometry which formulates the carrier trajectory in continuous time, organizes point clouds in probabilistic submaps, and jointly optimizes the loss terms of laser anchors, visual reprojections, and IMU readings, achieving accurate pose estimation even with fast motion or in unstructured scenes where it is difficult to extract meaningful几何特征。在后端,我们通过通过激光辅助视觉重新定位匹配预计的2D子包和6-DOF视觉约束来建立5-DOF激光限制,从而确保在大型场景中映射一致性。结果表明,我们的框架实现了高精度的估计,并且比载体在大型场景或快速移动时工作时更健壮。相关的代码和数据在https://cslinzhang.github.io/ct-lvi/ct-lvi/ct-lvi.html上进行开源。


人工智能研究员及工程师
- 研究了 ML 和计算机视觉技术,以从细胞图像中诊断遗传疾病。项目(Web Dev 和 C++)多伦多健身俱乐部 - 全栈健身俱乐部网站 2022 年秋季 - 使用 Django 和 ReactJS 为一个虚构的健身俱乐部构建了一个全栈网站。 - 作为多伦多大学 Web 编程课程的一部分,在一个 2 人团队中工作。3D 渲染引擎 - 用 C++ 从头开始构建的光栅化引擎 2022 年冬季 - 用 C++ 从头开始构建图形渲染引擎(光栅化器),不使用 OpenGL 或 DirectX 等图形库:https://github.com/render-farm/psr-3d-rendering-engine - 构建了一个自定义实体组件系统来管理游戏内对象并优化了核心渲染算法。 AutoDirect – 帮助用户找到具有定制、预批准贷款的汽车的网站 2021 年秋季 - 使用 Java Spring 和 PostgreSQL 架构和构建整个后端:https://github.com/TLI-Group-1/Backend - 使用 GitHub 操作为后端代码库实施回归测试基础架构。 - 在一个由 3 人组成的团队中工作,并与一家位于多伦多的初创公司合作,提供贷款预批准 API。 奖项和成就