机构名称:
¥ 1.0
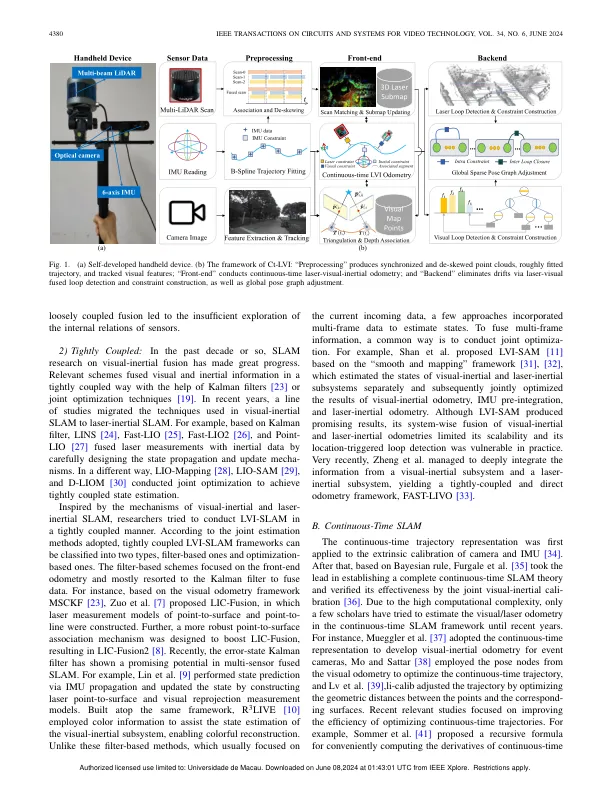
摘要 - 由于LiDar,Camera和IMU之间的固有互补性,最近对激光 - 视觉惯性大满贯付出了越来越多的努力。但是,现有方法在两个方面受到限制。首先,在前端,它们通常采用离散的时间表示,需要高精度硬件/软件同步,并基于几何激光功能,从而导致稳健性和可扩展性低。第二,在后端,视觉循环限制遭受了规模的歧义和点云的稀疏性,扫描到扫描环的检测恶化。To solve these problems, for the front-end, we propose a continuous-time laser-visual-inertial odometry which formulates the carrier trajectory in continuous time, organizes point clouds in probabilistic submaps, and jointly optimizes the loss terms of laser anchors, visual reprojections, and IMU readings, achieving accurate pose estimation even with fast motion or in unstructured scenes where it is difficult to extract meaningful几何特征。在后端,我们通过通过激光辅助视觉重新定位匹配预计的2D子包和6-DOF视觉约束来建立5-DOF激光限制,从而确保在大型场景中映射一致性。结果表明,我们的框架实现了高精度的估计,并且比载体在大型场景或快速移动时工作时更健壮。相关的代码和数据在https://cslinzhang.github.io/ct-lvi/ct-lvi/ct-lvi.html上进行开源。
通过滚动曲线在大规模点云中的全局本地化...
主要关键词



相关文件推荐