机构名称:
¥ 1.0
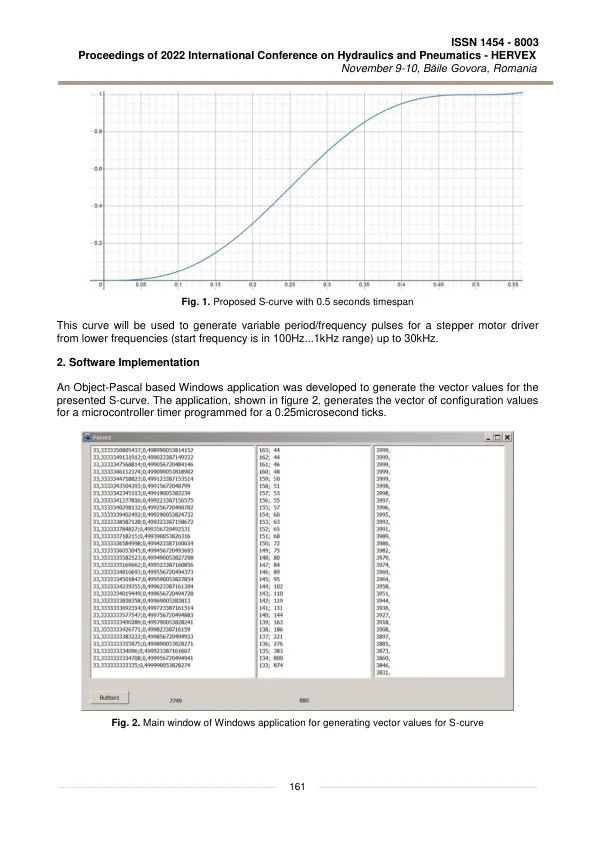
许多机电一体化应用需要执行器快速而精确地从一个点移动到另一个点。应避免执行器机构中的冲击,最好平稳运行;这些要求在运动开始时更难满足,尤其是对于使用步进电机实现的执行器,其运动分为离散部分。软启动操作是此类系统的良好解决方案,该技术涉及开始时较慢的运动,速度和加速度受控(有限)。软启动操作的良好实现是 S 曲线,它提供有限的速度、加速度和冲击 ([1])。在运动开始时,速度很慢,但逐渐增加到最大值;在运动结束时,速度开始以同样的方式降低。在典型的机械运动中,S 曲线轮廓的时间跨度为 0.5 秒是一个不错的值。考虑到这个参数,可以从三角函数中获得 S 曲线,如公式 (1) 所示:
使用 32 实现 S 曲线运动控制...
主要关键词

相关文件推荐