XiaoMi-AI文件搜索系统
World File Search System吸嘴
生物吸浆应用指南 - 第 II 卷
图 1-1. 用于 LNAPL 回收的泵送、撇取和生物吸出方法的比较.................................................... 5 图 1-2. 轻质非水相液体释放示例进程...................................................................................... 11 图 1-3. 多孔介质和观察井中空气、碳氢化合物和水的分布......................................................................................... 11 图 1-4. 多孔介质中水和 LNAPL 的假设相对渗透率曲线......................................................................................... 13 图 2-1. 降水测试记录表.................................................................................................................... 25 图 2-2. 监测土壤气的典型设置.................................................................................................... 24 图 3-1. 典型生物吸出井图............................................................................................................. 45 图 3-2. 土壤气监测点和生物吸出井的概念配置............................................................................. 43 图 3-3.典型土壤气体监测点示意图...................................................................................................... 49 图 3-4. 拖车式中试规模 Bioslurper 装置...................................................................................... 53 图 3-5. Bioslurper 中试测试试运行检查表...................................................................................... 57 图 3-6. 配置
DNA核碱基吸附在单层Ti3c2 ...
我们使用van der waals(vdw) - 纠正的密度函数理论和非平衡绿色的功能方法研究了DNA核苷酸酶[腺嘌呤(A),鸟嘌呤(g),胸腺嘧啶(T)和胞嘧啶(C)]与单层Ti 3 C 2 MXEN的相互作用。所有计算均针对石墨烯进行了基准测试。我们表明,取决于Ti 3 C 2表面上方的核碱基的初始垂直高度,可能是两个相互作用机制,即物理吸附和化学吸附。对于石墨烯,与石墨烯片上方核碱基的初始垂直高度无关,DNA核碱始终将物理呈现在石墨烯表面上。石墨烯的PBE + VDW结合能高(0.55-0.74 eV),并遵循G> a> t> C的顺序,吸附高度在3.16–3.22Å的范围内,表明强大的物理学。对于Ti 3 C 2,PBE + VDW结合能相对较弱(0.16-0.20 eV),并遵循A> g = T> C的阶,吸附高度在5.51–5.60Å的范围内,表明弱物理吸收。化学物质的结合能遵循g> a> t> c的顺序,这是相同的物理学顺序。结合能值(5.3-7.5 eV)表示非常强的化学吸附(约为物理吸附结合能的40倍)。此外,我们的频带结构和电子传输分析表明,对于物理吸附,频带结构没有显着变化,也没有调制状态的传输函数和设备密度。相对较弱的物理吸附和强烈的化学吸附表明,Ti 3 C 2可能无法使用物理吸附方法鉴定DNA核碱基。

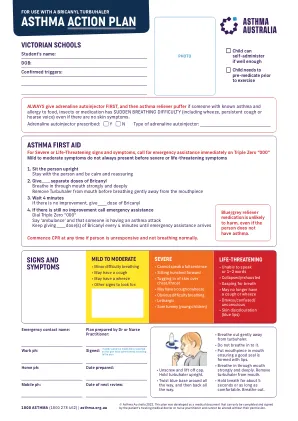
资本健康计划(CHP)成员的吸奶泵
个人用途,单或双重包括:(2)24毫米乳房屏蔽,(2)28mm乳房盾,2个阀门,2个回流保护器,2瓶,1个电源适配器,2个管子内置可充电电池(大约3小时)每侧具有预设循环水平的独立真空可调性。每个乳房分开电动机。提供更有效和富有成效的泵送会话,超级,LCD触摸屏

聚乙烯乙二醇对DNA吸附和杂交对
本文档是公认的手稿版本的已发表作品,该作品以最终形式出现在Langmuir,版权所有©美国化学学会之后,在出版商的同行评审和技术编辑后。要访问最终编辑和发布的工作,请参见http://dx.doi.org/10.1021/la302799s
甲氧氟烷吸入器用于急性疼痛管理
• 一次性吸入器,• 甲氧氟烷 3 毫升瓶,• 活性炭 (A/C) 室。准备和管理:• 确保将活性炭 (A/C) 室插入吸入器顶部的稀释孔中。每个瓶子都必须使用新的活性炭室和吸入器• 倾斜甲氧氟烷吸入器并将一个 3 毫升瓶的内容物倒入底座,同时旋转吸入器。请勿使用塑料注射器将瓶内容物转移到吸入器中• 轻轻摇晃以确保甲氧氟烷均匀分散在吸入器内,并在将吸入器交给患者之前擦拭吸嘴• 使用甲氧氟烷时,患者必须躺在床上或推车上• 不得在处方规定的疼痛手术间隙使用甲氧氟烷吸入器。例如:它不可用于在走动时控制疼痛 • 甲氧氟烷吸入器应自行使用,除患者外,其他人不得将其放在脸部/嘴部 • 甲氧氟烷吸入器可连接到标准面罩。如果使用面罩,必须由患者拿着,即不能固定在脸上 • 建议患者以缓解不适为目标,而不是完全消除疼痛 • 将腕带戴在患者的手腕上。识别吸嘴和
将CO2吸收到碳酸钾溶液中的动力学分析
3数据分析19 3.1数据收集。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。19 3.1.1 PV电源输出数据。。。。。。。。。。。。。。。。。。。。。。。。。。20 3.1.2历史天气数据。。。。。。。。。。。。。。。。。。。。。。。。。20 3.1.3数值天气预测数据。。。。。。。。。。。。。。。。。。。21 3.2数据预处理。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。23 3.2.1 PV电源数据集清洁过程。。。。。。。。。。。。。。。。。。。23 3.2.2历史天气数据集清洁过程。。。。。。。。。。。。。。24 3.2.3反弹NWP数据集清洁过程。。。。。。。。。。。。。。。。。24 3.2.4 Meteomatics NWP数据集清洁过程。。。。。。。。。。。。。。27 3.2.5数据转换。。。。。。。。。。。。。。。。。。。。。。。。。。。27 3.3探索性数据分析。。。。。。。。。。。。。。。。。。。。。。。。。。。。28 3.3.1实际与预测的天气参数。。。。。。。28 3.3.2 PV功率与预测辐照度。。。。。。。。。。。30 3.3.3功能工程。。。。。。。。。。。。。。。。。。。。。。。。。。。32
二氧化碳吸附在胺官能化粘土上
Q(mg co 2 /g ads)弯曲107 43 0.11 0.11 0.026 14.0 mont 245 52 0.33 0.043 0.043 10.1 paly 137 42 0.32 0.032 0.033 12.0 Sapo 151 69 0.16 0.16 0.16 0.040 15.40 15.4 SEPI 274 156 056 0.42 0.087 40.7 40.7 < /div>>
标准机器“基本” 传统机器“基本”
技术数据/技术特性 PF 41 ES Max。工作宽度/有用加工宽度 410 毫米 最大。库存清除/最大木材夹持 8 毫米刀架直径/压刨轴直径 95 毫米号刀具数量 4 主轴转速 RPM 刨床轴转速 tr/mn 5000 工作台长度 刨床工作台总长度 2200 mm 倾斜护栏尺寸 90°-45° / 刨床导轨可倾斜90°÷45° 1200 x 160 毫米 50/60 赫兹时的电机功率 (HP) (S6) / 50/60 赫兹时的电机功率 (CV) (S6) 5 千瓦 (6.6)/ 6 千瓦 (8 ) 吸力吸风罩直径 / 吸嘴直径 1 x Ø 120 mm 吸风速度 / 吸风速度 20 m/sec 空气消耗量 / 吸风消耗量 814 m³/h 主机净重 / 主机净重 411 Kg 设备 / 设备 翻转- 覆盖薄栅栏工件/用于薄工件的附加可伸缩导轨 • 铸铁开槽机/铸铁开槽机 • 带夹具的卡盘 5-10-16 毫米/带夹具的曼德林 5-10-16 毫米 • 自定心韦斯科特型卡盘 0-16 毫米/曼德林自定心 0-16 毫米(韦斯科特)• 带 4 把刀的“Tersa”刀架 / 带 4 把刀的 TERSA 型刨床主轴 • 带刀的螺旋主轴 / 带刀的螺旋主轴 • 桥式刨床保护装置 / 桥式刨床主轴保护装置 •
爬墙机器人:优化吸附和新型抽吸技术
摘要。本文回顾了爬壁机器人的进展,重点介绍了吸附优化和新型吸力技术。爬壁机器人因其在危险作业中的潜力以及在不影响机动性的情况下在各种墙面上导航的能力而引起了广泛关注。其中一项创新包括专为光滑墙面设计的机器人,集成了真空吸附系统和粘合带。这种设计增强了机器人的灵活性和可操纵性,并深入分析了其用于攀爬任务的附着机制。已经推导出稳定攀爬所需的吸附力和电机扭矩等关键参数,机器人的原型展示了在不同墙面上的高稳定性和适应性。另一项关键研究深入研究了吸入室中吸入压力的建模和实验分析,强调了不同室轮廓的作用。在腔室底部引入了一种底部限制器的新添加,并使用 3D 建模和计算流体动力学分析了其设计和性能。限制器对机器人粘附效率的影响已通过实验评估,在非抹灰砖墙上显示出良好的效果。通过这些研究,本文强调了爬墙机器人在不同应用中的不断发展和潜力。