
机构名称:
¥ 1.0
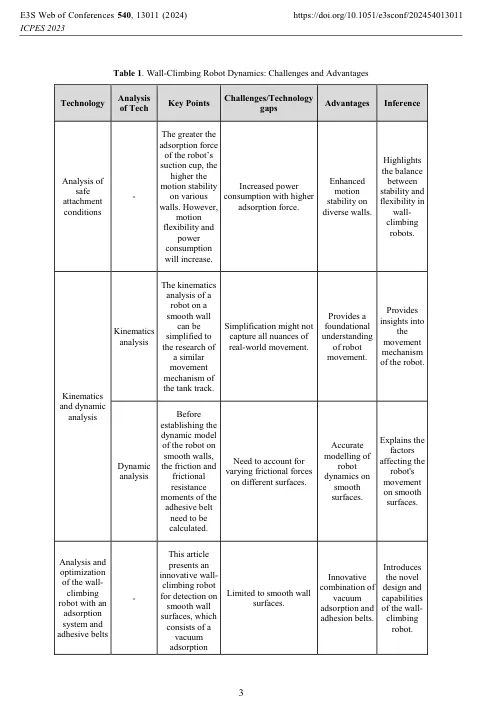
摘要。本文回顾了爬壁机器人的进展,重点介绍了吸附优化和新型吸力技术。爬壁机器人因其在危险作业中的潜力以及在不影响机动性的情况下在各种墙面上导航的能力而引起了广泛关注。其中一项创新包括专为光滑墙面设计的机器人,集成了真空吸附系统和粘合带。这种设计增强了机器人的灵活性和可操纵性,并深入分析了其用于攀爬任务的附着机制。已经推导出稳定攀爬所需的吸附力和电机扭矩等关键参数,机器人的原型展示了在不同墙面上的高稳定性和适应性。另一项关键研究深入研究了吸入室中吸入压力的建模和实验分析,强调了不同室轮廓的作用。在腔室底部引入了一种底部限制器的新添加,并使用 3D 建模和计算流体动力学分析了其设计和性能。限制器对机器人粘附效率的影响已通过实验评估,在非抹灰砖墙上显示出良好的效果。通过这些研究,本文强调了爬墙机器人在不同应用中的不断发展和潜力。
爬墙机器人:优化吸附和新型抽吸技术
主要关键词

相关文件推荐
























