XiaoMi-AI文件搜索系统
World File Search System和鲁
b'摘要\xe2\x80\x94准确估计充电状态 (SOC) 对于储能应用中电池管理系统 (BMS) 的有效和相对运行至关重要。本文提出了一种结合卷积神经网络 (CNN)、门控循环单元 (GRU) 和时间卷积网络 (TCN) 的新型混合深度学习模型,该模型结合了 RNN 模型特征和电压、电流和温度等非线性特征的时间依赖性,以与 SOC 建立关系。时间依赖性和监测信号之间的复杂关系源自磷酸铁锂 (LiFePO4) 电池的 DL 方法。所提出的模型利用 CNN 的特征提取能力、GRU 的时间动态建模和 TCN 序列预测强度的长期有效记忆能力来提高 SOC 估计的准确性和鲁棒性。我们使用来自 In\xef\xac\x82ux DB 的 LiFePO4 数据进行了实验,经过处理,并以 80:20 的比例用于模型的训练和验证。此外,我们将我们的模型的性能与 LSTM、CNN-LSTM、GRU、CNN-GRU 和 CNN-GRU-LSTM 的性能进行了比较。实验结果表明,我们提出的 CNN-GRU-TCN 混合模型在 LiFePO4 电池的 SOC 估计方面优于其他模型。'
b'摘要\xe2\x80\x94准确估计充电状态 (SOC) 对于储能应用中电池管理系统 (BMS) 的有效和相对运行至关重要。本文提出了一种结合卷积神经网络 (CNN)、门控循环单元 (GRU) 和时间卷积网络 (TCN) 的新型混合深度学习模型,该模型结合了 RNN 模型特征和电压、电流和温度等非线性特征的时间依赖性,以与 SOC 建立关系。时间依赖性和监测信号之间的复杂关系源自磷酸铁锂 (LiFePO4) 电池的 DL 方法。所提出的模型利用 CNN 的特征提取能力、GRU 的时间动态建模和 TCN 序列预测强度的长期有效记忆能力来提高 SOC 估计的准确性和鲁棒性。我们使用来自 In\xef\xac\x82ux DB 的 LiFePO4 数据进行了实验,经过处理,并以 80:20 的比例用于模型的训练和验证。此外,我们将我们的模型的性能与 LSTM、CNN-LSTM、GRU、CNN-GRU 和 CNN-GRU-LSTM 的性能进行了比较。实验结果表明,我们提出的 CNN-GRU-TCN 混合模型在 LiFePO4 电池的 SOC 估计方面优于其他模型。'

9月17日至2024年 - 始终 - 能源和鲁贝利特 -
材料协同作用,艾伯塔省卡尔加里 - 2024年9月17日 - Rubellite Energy Inc.(TSX:RBY)(“ Rubellite”)(“ Rubellite”)和Perpetual Energy Inc.(TSX:PMT)(PMT)(“ PMT)(“永久”)很高兴共同宣布,他们已经在整个安排协议(repement the Requlient in ther-there there there bore in there bore in there bore nery-nor-nery-emoll in y ther-emold)中 - “交易”)创建一个将由现有执行团队管理的更强大的公司,并将作为Rubellite Energy Corp.该交易将通过安排计划完成,将对Rubellite和Overpetual股东以及所有其他利益相关者都有重大利益。“该交易将为Rubellite和Perpetual的股东提供有价值的协同作用,包括定量和定性。” Rubellite和Perpetual的总裁兼首席执行官Sue Riddell Rose说。“股东将受益于拥有一家更大,更强大的公司,其自由资金流量增加,流动性增强和定义明确的有机增长状况。交易完成后,重新组合的公司估计将拥有9,300万股流通股,Rubellite股票的持有人将拥有72.7%的股份,永久股票的持有人将拥有14.8%的持有人,永久高级票据的持有人将拥有重新组合的公司的12.5%。Rubellite的四家银行集团已经确认,重组公司的信贷额度将具有1.4亿美元的借贷限额,并结合Rubellite的2000万美元未偿还的五年期限贷款(“ Rubellite定期贷款”),将提供增强的流动性。重新组合公司的重点(估计在关闭时)包括:The recombined company will continue to execute on the business plan focused on exploration, development and consolidation in the Clearwater and Mannville Stack heavy oil plays where multi-lateral horizontal drilling technology is being applied to unlock significant resource while generating attractive returns for shareholders while the non-operated natural gas asset in the Deep Basin at Edson provides diversification of funds flow and optionality to enhance the execution of the business plan.”根据交易,Rubellite普通股的持有人(“ Rubellite股票”)将获得重组公司的一(1)份公共股(“新股份”)(“新股”(“新股”),每份Rubellite份额,永久性股票的持有人(永久性股票”的持有人(永久性股票)将获得一(1)五(5)的新股票,并获得了26个(5)的新股票,并获得了26个股份的股票,并获得了26 $ 26的uffectial and Perepletial and Persece $ 26 $)根据宣布每股2.25美元的Rubellite股票的五天加权平均价格(“ VWAP”),将其转换为1,160万股重新组合公司的重点重新组合公司预计将在未来四年内以40到5000万美元的价格实现物质行政,运营和金融协同效应。随着大小和规模的增加,财务流动性的提高,并增强了重组企业的灵活性,并由其子公司进行的运营进行了运营,重新组合的公司将在其高质量钻孔库存的发展中具有很高的作用,并具有重要的优质性,并有效地通过其成长中心的商业计划来有效地实现合并资产的价值。

mammo-clip:一种视觉语言基础模型,以提高乳房X线摄影的数据效率和鲁棒性
摘要。缺乏有关乳腺癌检测的计算机辅助诊断(CAD)的大量培训数据一直是阻碍系统采用的问题之一。最近,通过视觉模型(VLM)(例如,剪辑)对大规模图像文本数据集进行预训练,部分解决了计算机视觉(CV)中鲁棒性和数据效率的问题。本文提出了Mammo-CLIP,这是第一个通过大量筛选乳房X线图 - 报告对的VLM,以解决数据集多样性和大小的挑战。我们在两个公共数据集上进行的实验表明,在对乳腺癌检测至关重要的各种乳腺X线学属性时表现出强烈的表现,表明数据效率和鲁棒性与CV中的剪辑相似。我们还提出了一种新型特征归因方法Mammo-Factor,以在乳房X线摄影报告中使用句子级粒度来提供表示表示的空间解释。代码可公开使用:https://github.com/batmanlab/mammo-clip。

使用共形预测对基于模型的控制器的不确定性定量和鲁棒化
在基于现代模型的控制框架中,例如模型预测控制或基于模型的信息学习学习,机器学习已成为一种无处不在的技术类别,以提高动态模型的准确性。通过利用诸如神经网络之类的表现力体系结构,这些框架旨在通过构建系统动力学的准确数据驱动表示,旨在提高系统的模型精度和控制性能。尽管对其非学习顾问进行了显着的绩效提高,但对于这些基于模型的模型的基于模型的控制器在不确定性的存在下,这些模型的控制器通常几乎没有保证。尤其是在模拟误差,噪声和外源性干扰的影响下,确定这些学习模型的准确性是一项挑战。在某些情况下,甚至可能违反约束,使控制器不安全。在这项工作中,我们提出了一个新颖的框架,该框架可以应用于大量的基于模型的控制器,并通过以在线和模块化方式鲁棒化基于模型的控制器,从而减轻上述问题,并在模型的准确性和约束满意度上提供可证明的保证。该框架首先部署保形预测,以生成有限的,可证明的有效的不确定性区域,以无分配方式为动态模型。通过动态约束程序,这些不确定性区域被纳入约束中。关键字:基于学习的控制,基于模型的控制,不确定性量化1。(2023a))。Jiahao等。Jiahao等。与预测参考生成器的配方一起,生成了一组可鲁棒的参考传播,并将其纳入基于模型的控制器中。使用两个实际的案例研究,我们证明我们提出的方法不仅产生了良好的不良区域,这些区域建立了模型的准确性,而且还使闭环系统以强大但不保守的方式满足约束。简介由于非线性优化框架的最新进展以及计算资源的可用性增加,在广泛的域上应用基于模型的控制器的应用趋势是趋势。,用于建筑物中的温度控制(Yao和Shekhar(2021)),用于自动驾驶汽车(Wu等人(2022))和四型控制(Chee等人机器学习方法的扩散同时导致了学习增强的,基于模型的控制框架的发展,这些框架利用学习工具通过改进动态模型来提高控制性能,例如(2023)。尽管这些发展激增,但这些基于学习的控制框架在不确定性存在下如何执行的问题仍然是一个积极的研究主题(Mesbah等人。(2022); Brunke等。(2022))。在这项工作中,我们通过提出一个新颖的框架来解决这个问题,该框架系统地允许基于模型的控制器在模型不匹配,噪声和外部干扰的集体影响下稳健地满足约束。

机器学习中的对抗训练和鲁棒性...
摘要:在机器学习领域,确保对抗攻击的鲁棒性越来越重要。对抗性训练已成为强化模型免受此类漏洞的重要战略。该项目提供了对抗性训练及其在加强机器学习框架弹性中的关键作用的全面概述。我们深入研究了对抗训练的基本原理,阐明了其基本机制和理论基础。此外,我们调查了在对抗训练中使用的最新方法和技术,包括对抗性示例生成和培训方法。通过对最近的进步和经验发现进行彻底的研究,我们评估了对抗性训练在增强各种领域和应用跨机器学习模型的鲁棒性方面的有效性。此外,我们应对挑战并确定这个新兴领域的开放研究途径,为未来的发展奠定了旨在增强机器学习系统在现实世界情景中的安全性和可靠性的基础。通过阐明对抗性训练的复杂性及其对强大的机器学习的影响,本文有助于促进对维护人工智能不断发展的环境中的对抗性威胁至关重要的理解和应用。关键字:对抗性培训,鲁棒性,SGD,模型增强
用于多功能,动态和鲁棒的双体运动控制
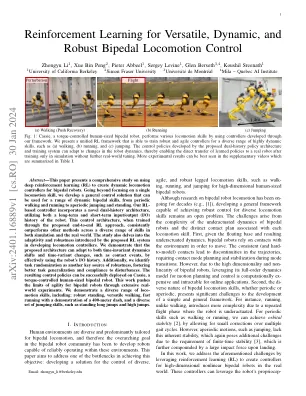
摘要 - 本文介绍了一项有关使用深钢筋学习(RL)为双皮亚机器人创建动态运动控制器的综合研究。超越了关注单个运动技能的关注,我们开发了一种通用控制解决方案,该解决方案可用于一系列动态的两足动物技能,从定期步行和跑步到Aperiodic的跳跃和站立。我们的基于RL的控制器结合了一种新颖的双历史结构,利用了机器人的长期和短期输入/输出(I/O)历史记录。通过拟议的端到端RL方法进行培训时,这种控制架构始终优于模拟和现实世界中各种技能的其他方法。该研究还深入研究了拟议的RL系统在开发运动控制器时引入的适应性和鲁棒性。我们证明,提出的体系结构可以通过有效使用机器人的I/O历史记录来适应时间不变的动态变化和时间变化的变化,例如接触事件。此外,我们将任务随机化确定为鲁棒性的另一个关键来源,促进了更好的任务概括和对干扰的依从性。可以成功部署所得控制的控制策略,这是一种扭矩控制的人尺寸的两头机器人。这项工作通过广泛的现实世界实验推动了双皮亚机器人的敏捷性限制。我们展示了各种各样的运动技能,包括:坚固的站立,多功能步行,快速跑步,展示了400米仪表板,以及各种各样的跳跃技能,例如站立的跳远和跳高。
生成式人工智能的攻击和鲁棒水印
创建一条关于我即将在卡内基梅隆大学(CMU,匹兹堡)发表的演讲的热门推文,标题为“大型语言模型的水印”。主题包括水印、检测人工智能生成的文本、保护模型的版权。尽量让它风趣幽默。

superfl:具有效率和鲁棒性的联合学习隐私性
联邦学习(FL)完成了协作模型培训,而无需共享本地培训数据。但是,现有的FL聚合方法遭受了效率低下,隐私脆弱性和对中毒攻击的忽视,从而严重影响了模型培训的整体性能和可靠性。为了应对这些挑战,我们提出了Superfl,这是一种有效的两服务汇总计划,既可以保存又可以保护中毒攻击。两个半honest服务器S 0和S 1相互协作,带有Shuffle Server S 0负责隐私聚类,而分析服务器S 1负责稳健性检测,识别和过滤恶意模型更新。我们的计划采用了同质加密和代理重新加密的新型组合,以实现安全的服务器与服务器协作。我们还利用一种新型的稀疏矩阵投影压缩技术来提高通信效率并显着降低开销。为了抵制中毒攻击,我们基于可信赖的根,将降低维度降低和规范计算引入双过滤算法,以识别恶意模型更新。广泛的实验验证了我们方案的效率和鲁棒性。SuperFL达到了令人印象深刻的压缩比,范围从5-40 x,在不同的模型下,同时以基线为基准的可比较模型精度。值得注意的是,我们的解决方案在MNIST和CIFAR-10数据集中分别显示出最大模型的准确性不超过2%和6%,在特定的压缩比和恶意客户的存在下。

曲贝替定和鲁比替定调节肿瘤微环境中细胞间的相互作用——其在癌症联合治疗中的应用进展
1 Alberto Sols-Morreale 生物医学研究所 (CSIC-UAM),Arturo Duperier 4,28029 马德里,西班牙; rlandauro@iib.uam.es (RL-V.); clucena@iib.uam.es (CA-L.) 2 巴塞罗那大学生物学院生物化学和分子生物医学系-生物医学研究所(IBUB),西班牙巴塞罗那 08028; martacascante@ub.edu 3 巴塞罗那大学材料科学与物理化学系,理论与计算化学研究所(IQTCUB),08028 巴塞罗那,西班牙 4 心血管疾病网络生物医学研究中心(CIBERClos III),2019,马德里,西班牙 * 通讯地址:apovo@iib.uam.es (AP-R.); lbosca@iib.uam.es (LB);电话:+34-914975345(AP-R.); +34-914972747 (LB)

HALE 的抗饱和鲁棒路径跟踪控制...
摘要 — 本文介绍了一种用于高空长航时 (HALE) 飞机的鲁棒路径跟踪控制器。操作 HALE 飞机的主要控制范例包括基本路径跟踪控制,即在处理非常有限的推力时跟踪参考飞行路径和空速。首要任务是即使在饱和推力期间也要将空速保持在 HALE 飞机的小飞行包线内。对于基本路径跟踪目标,提出了一种混合灵敏度方法,可以轻松处理解耦跟踪和鲁棒性要求。为了处理饱和控制输入,在控制设计中采用了防饱和方案。使用了一种基于观察者的新型混合灵敏度设计,允许直接使用基于反计算的经典防饱和方法。该控制设计在非线性模拟中得到验证,并与基于经典总能量控制的控制器进行了比较。