XiaoMi-AI文件搜索系统
World File Search System地面系统

无人机和地面系统集群... - SoarTech
全球安全与稳定面临的各种风险促使人们开发可部署在无人驾驶飞行器 (UxV) 上的遥感和监控系统。这需要开发强大的自主控制技术,以可靠地协调大量联网的异构系统,共同完成任务目标。本文介绍了一种有前途的应对这一挑战的方法,即使用群体智能协调实际应用中的多个异构飞行器和远程传感器。我们描述了一类基于数字信息素的协同算法,用于控制和协调异构无人空中和地面系统在两个应用中的行动:广域监视和基地保护。开发了一个操作员系统界面,以评估使单个操作员能够监控和管理不同类型的多辆无人驾驶飞行器和无人值守传感器的技术。本文报告了最近使用空中和地面平台演示该技术的结果。
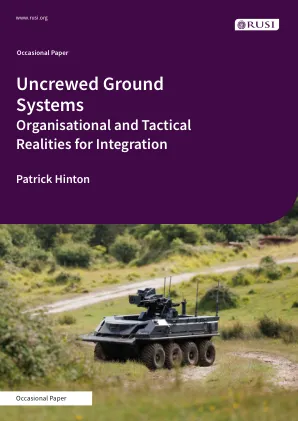
无人地面系统:组织和战术……
潜在用途包括携带货物,伤亡疏散,侦察,化学药品检测,通信和火灾支持。但是,理想用途和当前技术能力之间的差距很大。将系统传递到将要使用的地方,一旦到达那里的现实用途,而机器与士兵的互动经常被不受欢迎,但对于UGS将如何构成陆军并提供真正的运营优势至关重要。UGS的技术局限性必须反映在土地部队内部的任务组织中。必须考虑UGS将如何在战场上移动,因为通常不会出于自己的蒸汽。UGS的维护和维修将需要新的培训课程,并与工业合作伙伴建立密切的关系。

全球设备指南第 1 卷:地面系统
美国军队训练中的作战环境。COE OPFOR 包括“混合威胁”,代表用于训练应用和场景的理性和适应性对手。COE 时间段反映了当前训练以及延伸至近期的训练。本章涉及当前时间框架系统。这些表格中的设备列表提供了方便的基线示例,这些示例按能力层级排列,可用于组成用于训练场景的 OPFOR 设备阵列。有关 2014 年之后系统技术能力和趋势的指导,用户可以查看第 10 章“对策、升级和新兴技术”。这些表格提供了近期和中期的能力层级。OPFOR 设备分为四个“层级”,以便为对手描绘系统
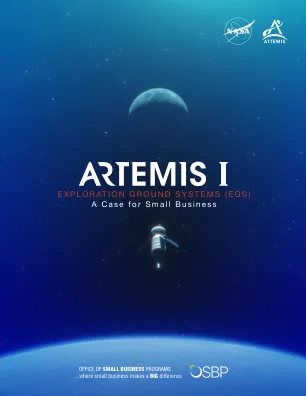
ARTEMIS I - 探索地面系统 (EGS)
在 Artemis I 任务将猎户座飞船送上月球之前,NASA 完成了太空发射系统计划 (SLS) 火箭的设计认证审查 (DCR)。这张特写照片显示,2021 年 9 月 20 日,用于 Artemis I 的 SLS 火箭位于佛罗里达州 NASA 肯尼迪航天中心的航天器装配大楼 (VAB) 的 High Bay 3 内。在 VAB 内部,火箭完成了脐带收放测试和综合模态测试。随着 SLS 设计的完成,NASA 现已认证了 SLS 和猎户座飞船设计,以及位于肯尼迪的新发射控制中心,用于 Artemis I 任务。

无人空中和地面系统及反...
可以连接任何支持 TCP/IP 的设备。带备用系统的导航。发动机故障时设备安全。可在一天中的任何时间和各种气候条件下使用。可以快速集成到其他控制系统中。提供用于信息交换的卫星频道。提供 ADS-B 接收器。通过互联网传输数据的能力。在线分析接收到的数据并存档。将所有显示对象绑定到地理坐标和时间。根据使用条件,以 480p、720p、1080p、4K 格式传输数据。以 4K (QFHD) 录制和保存信息。整个硬件的 UAV CAN 总线可提高数据交换和诊断速度。操作模式 - 自动、半自动或手动(安全通道无线电控制)。实时监视和侦察、目标检测、识别、鉴别和捕获。通信:GNSS - GPS/GLONASS、IRIDIUM(选项);链接 - 数字、安全、AES 代码。20 倍光学变焦、高分辨率控制 4K 视频摄像头,陀螺稳定在 3 轴平台上。4 倍数码变焦热传感器,第 4 代,640x480 分辨率。>25Hz 无人机 - IP53,GCS - MIL.STD.810F。

现代军事卫星通信网络的新领域
新地面系统现在正从静态网络迅速发展到动态网络。随着卫星逐渐由软件定义,新地面系统也随之适应。这意味着地面段将从传统的专用设备和器具转向与电信世界类似的虚拟化基础设施。通过虚拟化卫星通信地面段基础设施,网络运营商可以轻松、自动和动态地向其最终用户分配和交付资源。通过在整个网络架构中实施地面对应方使用的 3GPP 和 MEF 标准,将实现标准化和互操作性。一旦定义了统一的架构,就可以通过整个政府或军事网络的服务编排来简化服务和资源。