XiaoMi-AI文件搜索系统
World File Search System坐标系

使用飞行试验中的惯性导航系统数据确定攻角
图 1:NACA 空中数据臂设计,在 UTSI Cessna 210 右翼尖配备流动角叶片。 .............................................. 1 图 2:惯性(东北向下)坐标系。来源:USAF TPS [6]。 .............................................................................. 5 图 3:机身固定坐标系。来源:USAF TPS [6]。 ............................................................................................. 6 图 4:流动角参考系。u、v、w 分别是机身固定参考系上 x、y、z 方向的速度矢量。来源:NASA [9] ......................................................................................................... 8 图 5:X-Z 轴上的攻角、俯仰角和飞行路径角视图。来源:波音航空杂志 [11]。 ... 9 图 6:不同情况下攻角和俯仰角的差异 [12]。 ............................................................................. 9 图 7:由于升力要求,平飞中的攻角会发生变化 [12]。 ................................................................ 9 图 8:估算 Oswald 效率因子的方法。来源:Roskam [15]。 .............................................................. 16 图 9:阻力系数随马赫数变化的典型变化。来源:Kroo [16]。 .............................................................. 18 图 10:烟气风洞试验中机翼上方的上洗流。来源:Babinksy [17]。 ..............................................................
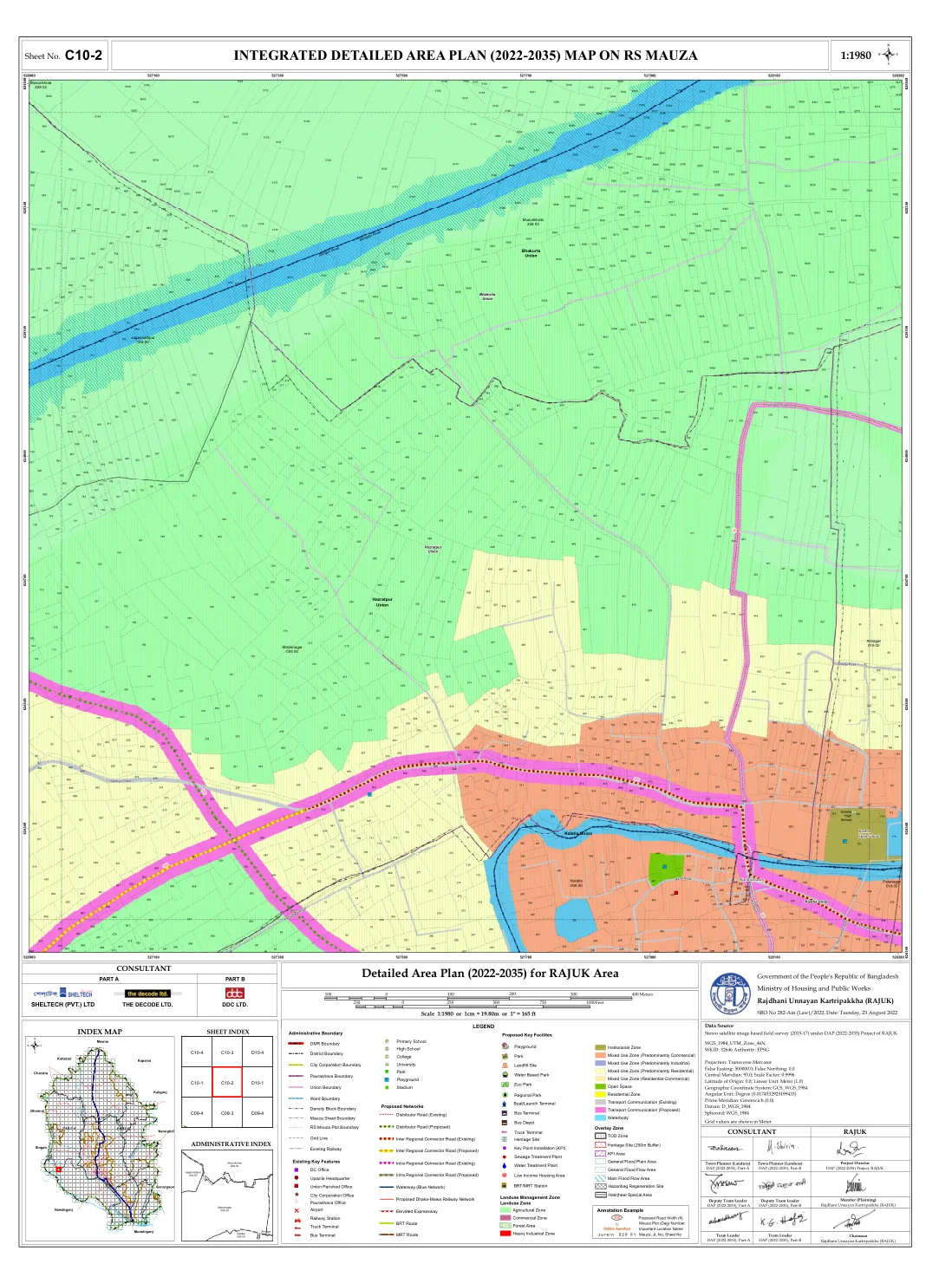
综合详细区域规划(2022-2035) RS MAUZA 表号上的地图。
投影:横轴墨卡托投影 东偏移:500000.0;北偏移:0.0 中央子午线:93.0;比例因子:0.9996 原点纬度:0.0;线性单位:米 (1.0) 地理坐标系:GCS_WGS_1984 角度单位:度 (0.0174532925199433) 本初子午线:格林威治 (0.0) 基准:D_WGS_1984 椭球体:WGS_1984
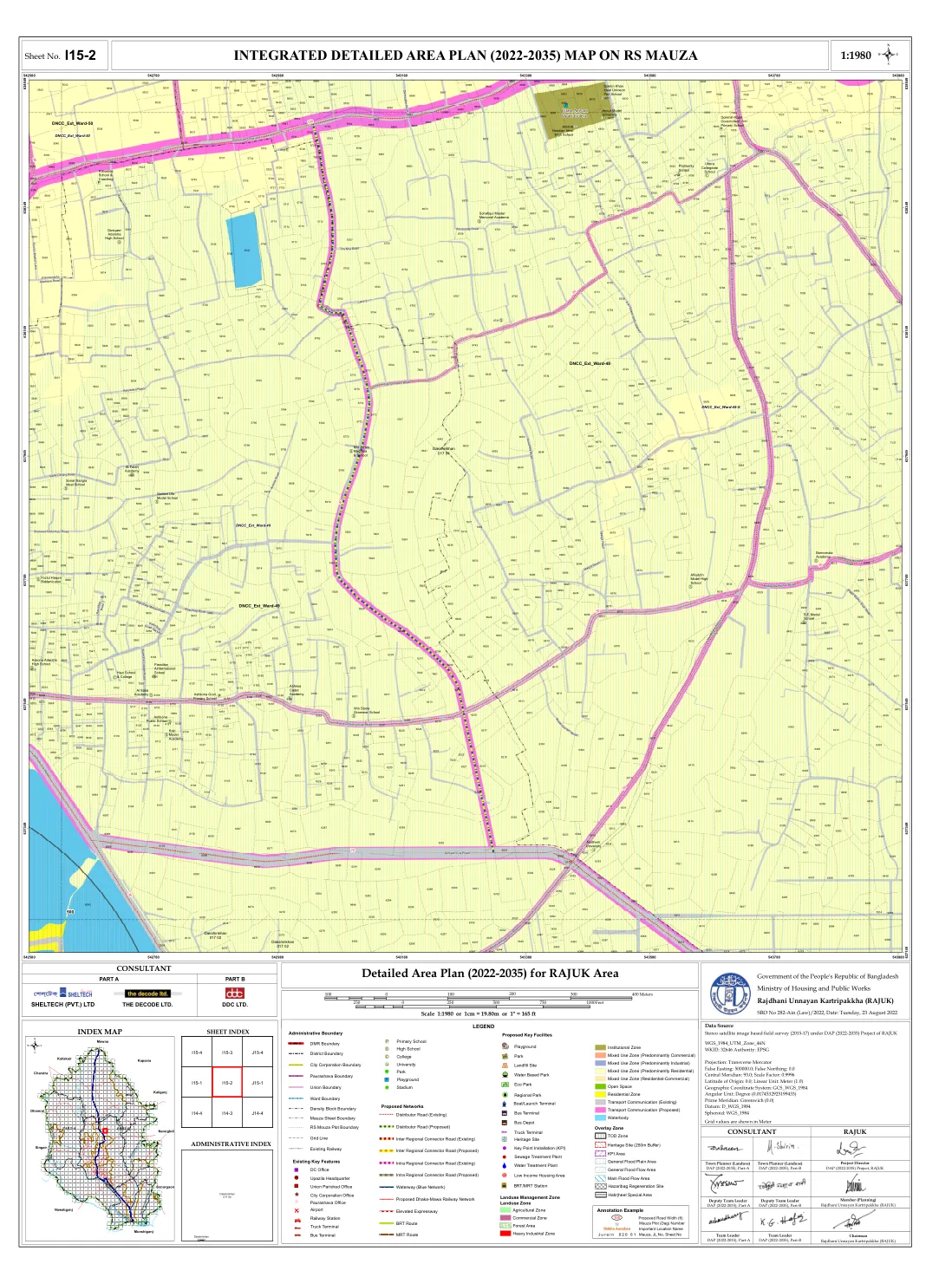
综合详细区域规划(2022-2035) RS MAUZA 表号上的地图。
投影:横轴墨卡托投影 东偏移:500000.0;北偏移:0.0 中央子午线:93.0;比例因子:0.9996 原点纬度:0.0;线性单位:米 (1.0) 地理坐标系:GCS_WGS_1984 角度单位:度 (0.0174532925199433) 本初子午线:格林威治 (0.0) 基准:D_WGS_1984 椭球体:WGS_1984
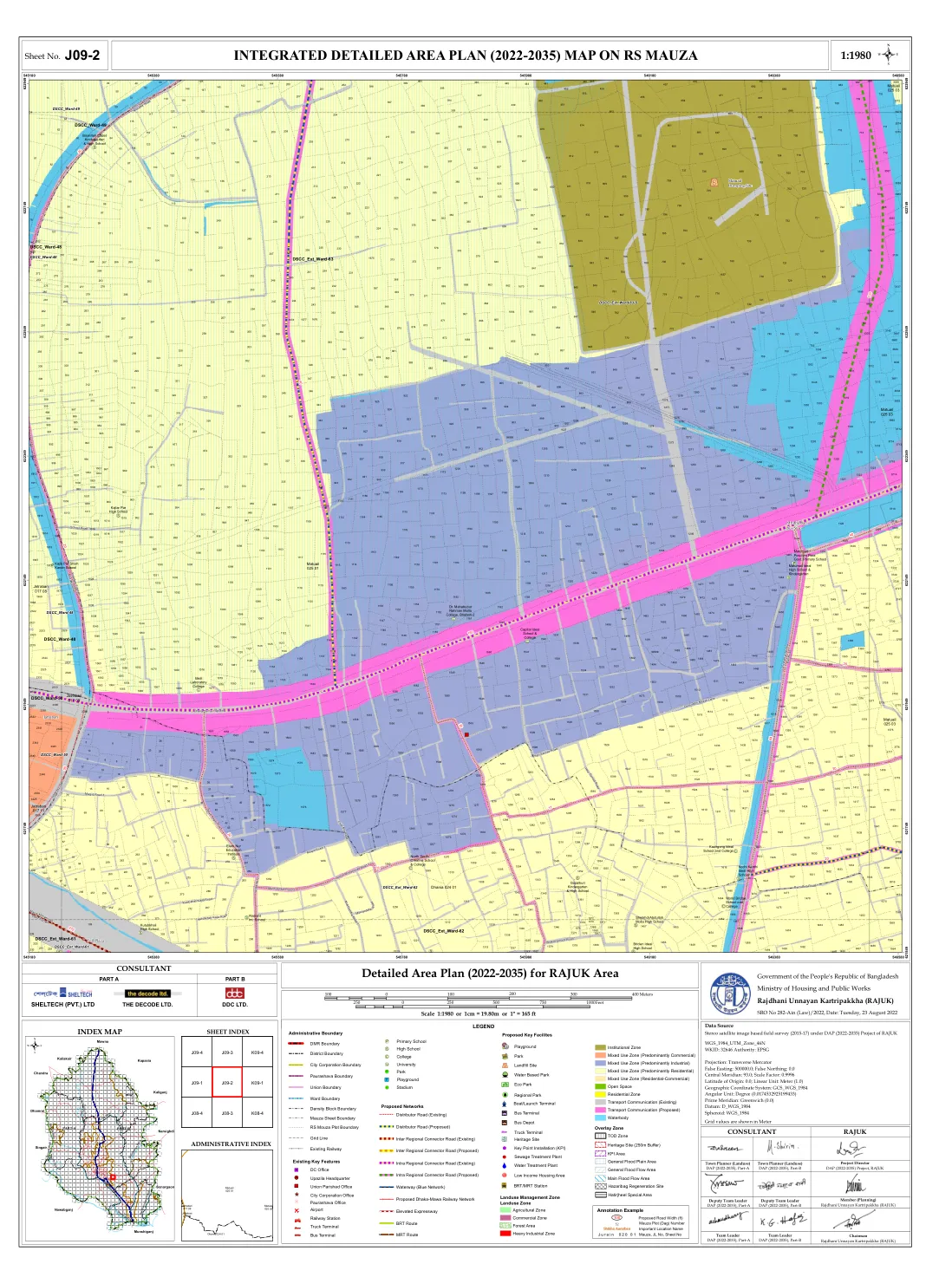
RS Mauza纸编号上的集成详细区域计划(2022-2035)地图。
投影:横向Mercator false Resting:500000.0;错误的北部:0.0中央子午线:93.0;比例因子:0.9996原始纬度:0.0;线性单元:仪表(1.0)地理坐标系:GCS_WGS_1984角单位:学位(0.0174532925199433)PRIME MERIDIAN:GREENWICH(0.0)基准:D_WGS_1984粒子:WGS_1984
委员会 F42 增材制造技术
国际标准化组织 (ISO) 2011 年与 ISO 签署了合作伙伴标准开发组织合作协议。该协议管理委员会 F42 和 ISO 技术委员会 261 在增材制造方面的持续合作,以消除重复工作。该伙伴关系的成果包括联合制定 ISO/ASTM 52900(增材制造技术标准术语);ISO/ASTM 52921(增材制造坐标系和测试方法标准术语);以及 ISO/ASTM52915(增材制造文件格式 (AMF) 1.1 版标准规范)。

3.2 | 三角积分
在本节中,我们将研究如何对各种三角函数乘积进行积分。这些积分称为三角积分。它们是积分技术三角代换的重要组成部分,该技术在三角代换中介绍。这种技术使我们能够将可能无法积分的代数表达式转换为涉及三角函数的表达式,我们可以使用本节中描述的技术对其进行积分。此外,这些类型的积分在我们稍后学习极坐标、圆柱坐标和球坐标系时经常出现。让我们从 sin x 和 cos x 的乘积开始我们的学习。

通过离子能量控制低温等离子蚀刻...
图 3.8. 计算漫反射角的说明。a) 粒子的漫反射将具有相对于表面法线的朗伯分布。b) 通过将表面法线假设为从笛卡尔 z 轴旋转的 Z 轴和在 XY 和 xy 车道交叉线上重叠的旋转 X 轴,只需要两个欧拉角。c) 利用欧拉角,将漫反射计算回主坐标系。d) 最终的粒子反射是镜面反射和漫反射的总和。................................................ 70

以负担得起的政策分解:
摘要:涉及多个不同物体的长马操纵任务对模仿学习提出了挑战,结果策略表现出较差的效率,概括和模块化。这些限制的核心是使用图像和绝对坐标系捕获世界状态。没有广泛的演示数据集,这些表示形式将策略限制为在封闭的空间位置,类别内实例甚至任务变化上操作。在本文中,我们提出了一种使用以负担性为中心的坐标框架来解决这些Challenges的方法。通过适当地重新定位此框架并使用此相对坐标系培训基于州的政策,我们证明我们不仅可以学习高度样本效果的操纵行为,而且可以推广到广泛的空间和类别内的范围。更重要的是,我们表明,这种表示使我们能够学习可以无缝组成的独立子验证,以解决复杂的,长的,多对象的任务,并具有对新任务变化的组成概括的模块化。我们在现实世界中涉及5个不同对象,13个类别内对象变化和7个不同的子任务的实际茶服务任务上进行了广泛的验证,这些方法表现出了广泛的空间变化,证明了我们解决整个长途任务的能力,仅需10个演示。视频演示和代码将在polition-decomposition.github.io上找到。
使用 GIS 进行地块测绘 - NEMRC
图 2.1:数字 GIS 数据层的元素 ………………………………………………..9 图 2.2:手动数字化的常见问题 …………………………………………..9 图 2.3:矢量化的优缺点 ……………………………………12 图 2.4:COGO 的优缺点 …………………………………………14 图 2.5:使用 GPS 的优缺点 ……………………………………..15 图 2.6:模拟地块地图 ……………………………………………………………..16 图 2.7:数字地块地图 …………………………………………………………………...16 图 2.8:数据格式……………………………………………………………………18 图 3.1:人工坐标系构造……………………………………...22 图 3.2:航空像片中的位移…………………………………………………..25 图 3.3:正射影像比例、分辨率、精度、对应的地块大小
