XiaoMi-AI文件搜索系统
World File Search System声呐浮标

用于声呐浮标的“VENOM 3U”™ VPX 集成处理器
通用动力公司最新的声纳浮标处理软件(包括被动和主动能量图以及强大的跟踪算法)旨在增强战术意识,同时显著减少操作员的工作量。一项新功能是“CUDA”(计算机化水下探测助手),这是一款“APP”,旨在自动评估嘈杂沿海地区的战术情况,而无需操作员干预。

从 www.ship-research.com 下载
随着减振降噪、消声瓦、消磁等相关技术的不断发展和完善,现代潜艇的探测难度越来越大。声呐浮标空投具有投放速度快、覆盖范围广、搜潜效率高、不易被水下潜艇探测和攻击等特点,是目前对抗反潜探测的最佳手段之一。因此,部署反潜直升机和空投声呐浮标已成为现代水面舰艇扩大反潜探测范围、提高反潜作战能力的有效手段。但反潜直升机作为主要的声呐浮标投放系统,对舰载储物空间和相关维护保障有严格的要求,中小型水面舰艇不具备搭载此类直升机的条件
使用军用 P(Y) 代码进行声呐浮标定位
• 声纳浮标可从精确的 GPS 定位中获益,从而改善操作 – 提高精度并降低飞机的脆弱性 – 允许联网声纳浮标定位和防区外操作 • OSD 策略要求对 GPS 军事应用使用安全的 P(Y) 代码 – 在战术环境中,C/A 代码 GPS 很容易被欺骗或拒绝 – 当前的军用 GPS UE (SAASM) 对于声纳浮标操作来说太昂贵了 • 传统 GPS 解决方案在具有挑战性的声纳浮标环境中无法很好地运行 – 由于天线在海面上方的高度较低,因此遮蔽程度较高 – 从存储中取出时首次定位时间较长。高海况和/或大风也会加剧 TTFF(长达数小时!) – 天线附近 1 瓦功率的射频干扰
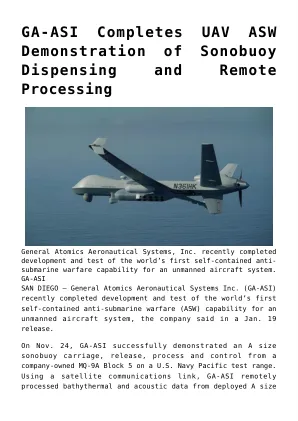
GA-ASI 完成无人机 ASW 声呐浮标投放和远程处理演示
GA-ASI 于 2017 年首次从 MQ-9A 上演示了声纳浮标远程处理能力。此后,GA-ASI 增加了声纳浮标管理和控制系统 (SMCS) 来监控和控制部署的声纳浮标,并开发了一种气动声纳浮标分配器系统 (SDS),该系统能够安全地携带和部署每个吊舱 10 个符合美国海军标准的 A 尺寸或 20 个 G 尺寸的声纳浮标。MQ-9B SeaGuardian 有四个机翼站可携带多达四个 SDS 吊舱,使其能够携带和分配多达 40 个 A 尺寸或 80 个 G 尺寸的声纳浮标,并在世界任何地方远程执行 ASW。
使用军用 P(Y) 代码进行声呐浮标定位
• 声纳浮标可从精确的 GPS 定位中获益,从而改善操作 – 提高精度并降低飞机的脆弱性 – 允许联网的声纳浮标定位和防区外操作 • OSD 策略要求对 GPS 军事应用使用安全的 P(Y) 代码 – 在战术环境中,C/A 代码 GPS 很容易被欺骗或拒绝 – 当前的军用 GPS UE (SAASM) 对于声纳浮标操作来说太昂贵了 • 传统 GPS 解决方案在具有挑战性的声纳浮标环境中无法很好地运行 – 由于天线在海面上方的高度较低,因此遮蔽程度高 – 从存储中取出时的首次定位时间较长。高海况和/或大风也会加剧 TTFF(长达数小时!) – 天线附近 1 瓦功率的射频干扰

使用扩展卡尔曼滤波器对声呐浮标进行主动物体跟踪
使用扩展卡尔曼滤波器对声纳浮标进行主动物体跟踪 1 Ch.Lakshmi Sravya、2 G.Mahesh、3 S.Koteswara Rao、4 B.Omkar Lakshmi Jagan 1,2,3 电子与计算机工程系、4 电子与电气工程系,K L 大学,贡土尔,印度 1 lakshmi.sravi7@gmail.com、2 mahesh88088@gmail.com、3 skrao@kluniversity.in、4 lakshmijagan@kluniversity.in 摘要:在水下,声纳浮标接收物体信息。声纳浮标生成物体距离和方位测量值。扩展卡尔曼滤波器用于处理噪声破坏的测量值,以生成物体运动参数 (OMP)。OMP通过超高频链路与飞机进行进一步处理。给出了模拟结果。关键词-全球定位系统、声纳浮标、物体运动分析、随机处理、统计随机处理
使用扩展卡尔曼滤波器对声呐浮标进行主动对象跟踪
使用扩展卡尔曼滤波器对声纳浮标进行主动物体跟踪 1 Ch.Lakshmi Sravya、2 G.Mahesh、3 S.Koteswara Rao、4 B.Omkar Lakshmi Jagan 1,2,3 电子与计算机工程系、4 电子与电气工程系,K L 大学,贡土尔,印度 1 lakshmi.sravi7@gmail.com、2 mahesh88088@gmail.com、3 skrao@kluniversity.in、4 lakshmijagan@kluniversity.in 摘要:在水下,声纳浮标接收物体信息。声纳浮标生成物体距离和方位测量值。扩展卡尔曼滤波器用于处理噪声破坏的测量值,以生成物体运动参数 (OMP)。OMP通过超高频链路与飞机进行进一步处理。给出了模拟结果。关键词-全球定位系统、声纳浮标、物体运动分析、随机处理、统计随机处理

反潜巡逻机利用圆形声呐浮标阵执行呼叫搜索任务的建模与仿真研究
利用提出的潜艇位置分布模型对圆形声呐浮标阵进行搜索,评估模型计算结果与计算机仿真方法对搜索概率计算结果相一致,证明了模型的正确性,同时也表明潜艇的评估结果与潜艇位置分布密切相关,应根据情况合理选取。实际使用中,可在模型中加入修正项,使模型计算结果与仿真结果更加接近。
招标修订/合同修改 - BAE 系统公司
baesystems.com › uploadFile PDF 2009 年 8 月 12 日 — 2009 年 8 月 12 日 LSFS 轻型机载多用途系统声呐浮标功能段...海军标准操作系统和执行程序包括但不限于...

在战略海峡部署声呐浮标和声音监视系统,以支持印度尼西亚群岛国家的水下防御系统
摘要 :ALKI 水域是印度尼西亚的战略海峡,具有复杂的特性,容易受到外国船只的渗透。目前,印尼海军仍然注重海平面安全,而随着当今技术的进步,许多外国潜艇正在利用水下区域实施跨国犯罪。被利用的水面下的区域是阴影区,有可能成为潜艇的藏身之处。阴影区是一个安全区,其中层的温度和盐度反映了传入声波的传播,因此潜艇可以避免被声纳探测到。本文旨在通过安装声纳浮标和声音监视系统 (SOSUS) 来监视进入印尼领土的外国潜艇的动向,尤其是通过战略海峡,为使用声学层析成像技术提供替代解决方案。本研究采用混合方法,处理受访者问卷中的定量数据,这些数据涉及使用分析网络过程 (ANP) 和检测概率理论方法确定声纳浮标放置坐标的标准和替代方案。为了处理定量数据(阴影区和潜艇探测),研究人员使用抛物线方程法模拟和建模了 SOSUS 的声波传播,该方法使用 MATLAB 和 Act up v.2.2L 工具箱进行处理,并处理来自专家访谈的定性数据以完成定量数据。研究结果表明,获得了声呐浮标的最佳放置优先级和数量。通过关注温度、盐度和声速等水文海洋数据,优化了声波传播模拟。它还通过固定声纳阵列操作的概念获得了 SOSUS 的放置位置和数量,希望能够了解阴影区并检测外国潜艇,以支持印度尼西亚群岛的水下防御系统