XiaoMi-AI文件搜索系统
World File Search System声呐浮标

声呐浮标从第二次世界大战到冷战的演变
主要的机载反潜战传感器——消耗性声纳浮标是在第二次世界大战期间为应对德国 U 型潜艇对大西洋上的盟军船只造成的毁灭性破坏而开发的。20 世纪 40 年代从飞机上扔出的简单无线电连接监听装置对空中反潜战产生了革命性的影响。在随后的几十年中,声学声纳浮标的发展遵循了多个方向。从第二次世界大战中第一个无源全向宽带声纳浮标 AN/CRT-1,到冷战时期的无源定向窄带声纳浮标 AN/SSQ-53 DIFAR 和 AN/SSQ-77 VLAD,以及主动定向声纳浮标 AN/SSQ-62 DICASS,声纳浮标的能力和战术部署不断发展,以应对日益复杂的苏联潜艇威胁。随着声纳浮标技术的不断改进和其多种表现形式的发展,本文结合不断发展的威胁进行了描述。阐述了从 CODAR 到 Julie and Jezebel 再到 DIFAR 的作战概念的进步,并讨论了水下声学和海洋环境的进步对声纳浮标设计的影响。声纳浮标是一种简单、可靠、廉价、技术复杂、适应性强且有效的设备,已生产了数百万个并使用了近七十年。
声呐浮标从二战到冷战的演变
主要的机载反潜战传感器——消耗性声纳浮标是在第二次世界大战期间为应对德国 U 型潜艇对大西洋上的盟军船只造成的毁灭性破坏而开发的。20 世纪 40 年代从飞机上扔出的简单无线电连接监听装置对空中反潜战产生了革命性的影响。在随后的几十年中,声学声纳浮标的发展遵循了多个方向。从第二次世界大战中第一个无源全向宽带声纳浮标 AN/CRT-1,到冷战时期的无源定向窄带声纳浮标 AN/SSQ-53 DIFAR 和 AN/SSQ-77 VLAD,以及主动定向声纳浮标 AN/SSQ-62 DICASS,声纳浮标的能力和战术部署不断发展,以应对日益复杂的苏联潜艇威胁。结合声纳浮标的发展及其不断改进的技术,以及其多种表现形式,对声纳浮标的发展进行了描述,以应对不断发展的威胁。阐述了从 CODAR 到 Julie and Jezebel 再到 DIFAR 的作战概念的进步,并讨论了水下声学和海洋环境的进步对声纳浮标设计的影响。声纳浮标是一种简单、可靠、廉价、技术复杂、适应性强且有效的设备,已生产了数百万台,并使用了近七十年。
确保声呐浮标供应链安全:澳大利亚如何……
本文重点介绍了声呐浮标供应链所面临的挑战,声呐浮标供应链是美国及其许多主要盟友执行反潜战 (ASW) 行动的关键项目。本文认为,澳大利亚完全有能力解决这些问题,而且这样做将更好地保障印度太平洋地区的集体反潜战行动。在冷战后短暂的停滞之后,中国和俄罗斯的潜艇舰队得到了显著改进,反潜战重新成为美国海军的一项核心任务。然而,反潜战行动的需求不断增长,暴露出美国海上飞机舰队在维护、采购和战备方面的不足,而这些对于执行这些任务至关重要。本文认为,因此,美国在印度太平洋地区的盟友和合作伙伴(其中许多运营着美国制造的海上飞机)可能需要加大对地区反潜战行动的贡献。然而,所有这些国家都使用的声纳浮标供应链存在严重漏洞,有可能破坏集体努力,这些挑战早在全球 COVID-19 疫情爆发之前就已存在。目前,只有一家美国供应商为美国及其许多主要合作伙伴提供声纳浮标,但其长期满足不断增长的需求的能力存在疑问。在目前的情况下,声纳浮标供应链的任何中断都会对印度太平洋地区的盟友和合作伙伴造成不成比例的影响,同时他们也被要求加大对集体反潜战的贡献。

长寿命环境声呐浮标对...的潜在影响
军事活动的重点最近已从大面积交战转向区域冲突。因此,海军海上作战继续向复杂的浅水近岸环境中的沿海战争发展。这种演变需要新的传感器、先进的作战概念和改进的数据分析能力等。在这些恶劣环境区域规划行动很困难,因为准确预测战术传感器性能取决于对当地环境条件的详细了解。因此,战术任务规划很少是最佳或有效的 - 通常导致覆盖范围不足、风险增加和任务成功率降低。美国海军正在探索延长寿命的环境声纳浮标概念,以更好地表征沿海环境。一些设计包含用于测量海洋温度的热敏电阻串和用于测量环境噪声的水听器。这种复杂的声纳浮标比传统的单次测量消耗性深海温度计要昂贵得多,但它可以提供更彻底的环境评估。本文从覆盖面积和检测概率的角度研究了增加的传感器成本与提高的 ASW 性能之间的权衡。对于这种权衡分析,使用了日本海的温度数据以及来自档案数据和噪声统计模型的真实动态环境噪声场。然后模拟了几个虚构的环境浮标在该区域漂流并在几天内收集数据。分析表明,漂流的延长寿命环境声纳浮标场可以显着改善环境表征、战术规划和 ASW 检测性能。
声呐浮标从二战到冷战的演变
主要的机载反潜战传感器——消耗性声纳浮标是在第二次世界大战期间为应对德国 U 型潜艇对大西洋上的盟军船只造成的毁灭性破坏而开发的。20 世纪 40 年代从飞机上扔出的简单无线电连接监听装置对空中反潜战产生了革命性的影响。在随后的几十年中,声学声纳浮标的发展遵循了多个方向。从第二次世界大战中第一个无源全向宽带声纳浮标 AN/CRT-1,到冷战时期的无源定向窄带声纳浮标 AN/SSQ-53 DIFAR 和 AN/SSQ-77 VLAD,以及主动定向声纳浮标 AN/SSQ-62 DICASS,声纳浮标的能力和战术部署不断发展,以应对日益复杂的苏联潜艇威胁。结合声纳浮标的发展及其不断改进的技术,以及其多种表现形式,对声纳浮标的发展进行了描述,以应对不断发展的威胁。阐述了从 CODAR 到 Julie and Jezebel 再到 DIFAR 的作战概念的进步,并讨论了水下声学和海洋环境的进步对声纳浮标设计的影响。声纳浮标是一种简单、可靠、廉价、技术复杂、适应性强且有效的设备,已生产了数百万台,并使用了近七十年。

不规则声呐浮标模式的设计和性能...
摘要 - 冷战期间开发了最佳单基地声纳浮标场模式,用于深而均匀的海底环境,其中简单的中值检测范围可用于定义声纳浮标之间有用的固定间距。然而,当前经常进行作战的沿海环境中的海洋和声学条件非常复杂且动态,以至于空间和时间的变化破坏了与传统战术搜索概念相关的同质假设。已经开展了多项研究工作来设计更好的被动和单基地主动声纳浮标位置,但其中大多数是评估算法,而不是真正的规划算法。一种不同的算法方法已成功开发并最初应用于单基地移动传感器,该方法从一组随机的传感器位置开始,然后使用遗传算法找到近似最优解。遗传算法解决方案是非标准搜索路径,可适应复杂的海洋学、可变的底部特性和假定的目标战术 [D.P.Kierstead 和 D.R.DelBalzo,《军事运筹学杂志》(2003 年 3 月/4 月)]。随后开发了一种新功能,用于优化复杂沿海环境中多静态主动声纳浮标的位置(纬度、经度和深度)和 ping 时间。这些算法称为 SCOUT(传感器协调以实现最佳利用和战术)。SCOUT 包含对移动传感器遗传算法方法的两项重大修改,以解释双静态和多静态声纳浮标场,其中每个接收器都能够观察来自每个源的数据。第一个修改是在结构上,引入了一个新的染色体来描述战术计划。每个声纳浮标都有一个基因,由一个位置、一个有序的部署序列和一组 ping 时间组成。新染色体中的位置和时间独立变异,并以不规则的模式和非连续的 ping 序列为特征。第二个修改是在检测建模上,引入了一种新的双基地检测模型。它允许相干和非相干处理的组合。对于这项工作,我们假设可以同时监控所有声纳浮标。本文讨论了现实环境中的新染色体结构和模拟结果。结果表明:a) SCOUT 可以有效地将多基地传感器场适应SCOUT 算法是我们之前的遗传算法工作的扩展,据我们所知,它们是唯一从头开始设计复杂环境中多静态主动声纳浮标位置的解决方案,而不是推荐一般的努力分配或简单地评估具有不同参数的标准模式。
DPA Title III AN/SSQ-101B 声呐浮标生产能力...
制造成熟度计划 MRA 完成后 30 天 3 个声呐浮标,详见 SOO 按要求交付到 SOO 附件 14 1,2 中定义的地址

声呐浮标处理系统 | 通用动力英国公司
Sonobuoy_DS_UK_07-05-2019 ©2019 General Dynamics。保留所有权利。General Dynamics 保留随时更改其产品和规格的权利,恕不另行通知。此处注明的所有商标均为 General Dynamics 的商标。所有其他产品和服务名称均为其各自所有者的财产。

可由无人机机器人部署的通信声呐浮标
在大多数情况下,AUV 等潜水器仍然需要一条称为系绳的物理电缆将水下航行器与水面部署船上的人工控制员连接起来。目前缺乏低成本高效的水下调制解调器是主要原因。微型通信声纳浮标旨在充当高度可部署的水下调制解调器,与水面上的射频 (RF) 发射器耦合,从而形成水面和水下基站之间的无缝通信链路。水下通信链路必须能够传输控制命令以及维持来自 AUV 综合故障排除系统 ITS [1] 的诊断数据流。通信链路以微型声纳浮标的形式封装,以方便通过 M-UAV 和旋翼四轴飞行器 [2 & 3] 进行部署。在本文中,我们介绍了微型通信声纳浮标的设计,其中包括最关键的组件——水下调制解调器。水下调制解调器由换能器、水听器和调制技术组成。二。限制 在设计微型通信声纳浮标时面临几个限制。其中一个主要限制是成本,因为初始资金来自低预算。另一个主要限制是声纳浮标的物理尺寸和重量,因为它不能超过 M-UAV 可以携带的最大有效载荷尺寸和重量。
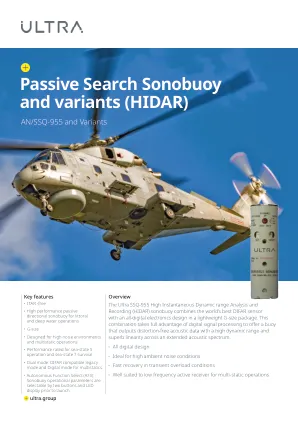
被动搜索声呐浮标及其变体 (HIDAR) - Ultra Group
从飞机上释放后,降落伞将下降速度限制在大约 30 米/秒。入水后,将部署一个水面浮标,其中包含用于声学数据遥测的甚高频发射器。全向和定向声学传感器信号被传输到机载或舰载声学处理器,用于对窄带、宽带和瞬态潜艇声发射进行被动检测。浮标还将以多静态或主动辅助角色检测低频主动发射和回声。