XiaoMi-AI文件搜索系统
World File Search System声学数据

研究PC-20-04 Adrift,6-29-2023
NOAA西南渔业科学中心的研究人员正在开发FOSSA,这是一系列开放源软件包,可用于有效处理和分析被动声学数据。建立在开源,多平台语言的基础上,R,这三个软件包将包含:(1)提取原始元数据,将其与辅助数据集成,并为下游分析(PAMR,在开发中)生成摘要和输出,(开发中),(2)使用塞氏群体分类的强大和系统分类的方法(3)(3)(3)(2)使用cetacean copleciention and Passifation and Couttion(3)声学鲸类人口评估工具(Pamde,2020年)。这些都是为与Pamguard软件收集和分析的声学数据无缝配合的;但是,它的效用广泛适用于声学数据。最终,Banter,PAMR和PAMDE提供的分析进步将允许有效,标准化的结果,可以通过最少的人类干预来快速产生。

深水的深度学习:海洋科学专家的机器学习框架
摘要:在数据的空前可用性的驱动下,机器学习已成为行业和科学的普遍性和变革性技术。其对海洋科学的重要性已被赋予了联合国海洋十年的目标之一。虽然收集了增加数量的声学海洋数据以进行研究和监测目的,并且机器学习方法可以实现自动处理和分析声学数据,但它们需要由专家注释或标记的大型培训数据集。因此,解决标记数据的相对稀缺性,除了增加数据分析和处理能力外,还有主要推力区域之一。解决标签稀缺的一种方法是专家在循环的方法,它允许对有限和不平衡数据有效分析。它的优势是通过我们新颖的基于学习的深度专家框架来证明的,用于自动检测Echo Sounder数据中的湍流唤醒签名。使用机器学习算法,例如本研究中提出的算法,大大提高了分析大量声学数据的能力。这将是实现海洋科学中越来越多的声学数据的全部潜力的第一步。


使用原位宽频带宽声压检测线材和电弧增材制造中的缺陷
摘要 线材和电弧增材制造 (WAAM) 是一种增材制造 (AM) 工艺,可以生产大型金属部件,材料浪费少,生产率高。然而,WAAM 的高沉积率需要高热量输入,这可能导致孔隙、裂纹、未熔合或变形等潜在缺陷。为了在工业环境中实际实施 WAAM 工艺,必须确保无缺陷生产。然而,使用传统 NDT 技术(例如超声波、涡流、X 射线)进行 NDT 检测是一项非常艰巨的任务,尤其是在零件生产过程中。因此,需要可靠的在线 NDT 检测和监测技术来推广 WAAM 的工业应用。这项工作的目的是使用频率带宽为 10 至 1MHz 的现场采集声学数据来检测 WAAM 生产零件上的缺陷形成。WAAM 零件经过故意引入污染物的处理,同时获取其声学信号以将不同的信号特征与缺陷关联起来。为了识别缺陷形成,使用了两种不同类型的麦克风从同一沉积过程中获取数据。信号处理包括应用时域和频域技术,即功率谱密度和短时傅立叶变换。获得的声学特征可以区分有缺陷和无缺陷的信号,并确定污染物的空间位置。获取的声学信号还表明,传统麦克风获取的数据不足以完全表征 WAAM 工艺发出的声谱。这项工作展示了声学数据和信号处理在 WAAM 生产部件的在线检查中的潜力。关键词:WAAM、声学、傅里叶变换、光学麦克风、STFT

鲸类调查期间的声纳浮标声学数据收集
尽管存在潜力,但声纳浮标特有的众多复杂因素可能会对使用 DIFAR 信号进行方位角估计的准确性、声学数据的质量以及数据解释产生负面影响。本报告旨在确定数据收集方法,以缓解许多与依赖声纳浮标进行声学记录和方位角估计的海洋哺乳动物声学研究相关的问题。这包括建议的数据收集硬件和软件方法、硬件系统的校准以及部署和校准声纳浮标的协议和方法。这些硬件和软件方法预计会随着时间的推移而发生变化,在实施涉及声纳浮标的研究计划之前,应考虑最近的技术进步。

海洋工程,IEEE 期刊 - 语义学者
摘要 - 在北极地区,从浮冰进行的水下声学测量通常需要无人遥控水听器。目的可能是设置冰下声学跟踪范围,以避免冰站产生的噪音和/或测量传输损耗。无论如何,最好使用可靠、成本低、易于操作、坚固耐用且无需维护的系统。这些理想特性可以通过使用基于改进的声纳浮标的手动部署远程水听器系统来满足。本文介绍了在北极修改、供电和手动部署 AN/SSQ-57A 声纳浮标的具体方法和设备。这些方法和建议可以轻松扩展以用于其他类型的声纳浮标。经过修改的声纳浮标可以从远程无人站点连续传输长达 30 天,范围为 20 公里。将提供来自 APLIS 87 冰站的样本声学数据。
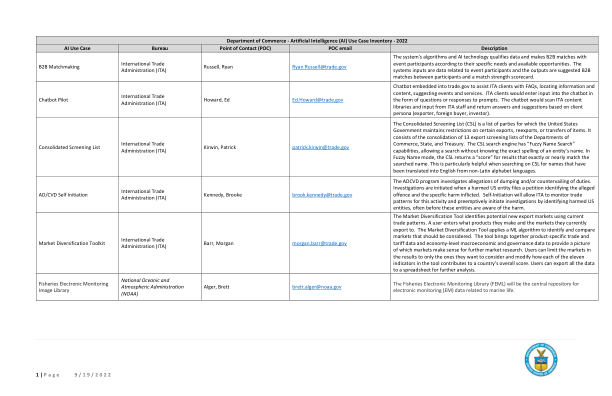
商务部 - 人工智能 (AI) 用例清单 - 2022 年人工智能用例局联络点 (POC) POC 电子邮件说明
随着气候变化继续影响北极海洋哺乳动物,及时处理这些数据对于采取缓解措施至关重要。非特定呼叫类型噪声和声景容忍调查基础设施 (INSTINCT) 是内部开发的命令行软件,用于模型训练、评估和部署机器学习模型,以便在被动声学数据中检测海洋哺乳动物。它还包括用于标记和验证的注释工作流程。INSTINCT 已成功部署在多项分析中,并且需要进一步开发 INSTINCT 中的检测器以用于未来的新研究和自动化。将 AI 方法继续整合到 CAEP 声学小组的现有流程中,需要熟悉 INSTINCT、机器学习和阿拉斯加地区海洋哺乳动物声学曲目的熟练操作员。
渔业声学、科学和技术工作组(WGFAST)
渔业声学、科学和技术工作组 (WGFAST) 专注于开发和应用科学技术来观察海洋环境。在本报告中,WGFAST 总结了 40 场演讲,涉及三个主题:“表征种群、生态系统、栖息地和行为的声学方法”、“海洋生物的声学表征”和“新兴技术、方法和协议”,以及针对这三个主题的讨论。这些会议的共同主题是越来越多地使用自动驾驶汽车收集数据,以及越来越多地使用先进的统计方法来处理和定量解释声学数据。各种移动和固定平台收集的声学、环境和生物数据提供了多种数据流来表征生态系统,许多演讲强调了利用长期数据序列的统计方法来提高我们对生态系统如何响应人类和自然压力而变化的理解。
历史性的 ARP 和 HARP 被动声学录音......
在海军先前的资助下,斯克里普斯鲸鱼声学实验室使用声学记录包 (ARP) 和高频声学记录包 (HARP) 收集了大量被动声学数据。如果没有适当的数据存档方法,这些数据可能会损坏或丢失。美国国家环境信息中心 (NCEI) 一直致力于创建国家基础设施,以保存被动声学监测数据并使其可供公众获取以供未来分析。该项目将重点保存 1999 年至 2009 年间收集的最古老的数据集,总计约 100 兆兆字节 (TB) 的记录数据。存档这些数据集包括合并数据集、确保元数据完整性以及将这些数据集物理传输到 NCEI。项目团队将与海军实体和 NCEI 工作人员合作,开发和简化存档流程,以提高未来存档工作的可行性。
第 73 章 声纳技术员 (表面) (stg) - MyNavyHR
E4 CORE 收集声学数据媒体记录 E4 CORE 配置辅助空气和冷却水系统 E4 CORE 配置深度探测系统 E4 CORE 配置声纳罩增压系统 E5 CORE 配置鱼雷对抗系统 E4 CORE 配置水下通信系统设备 E7 CORE 管理声纳罩增压系统操作 E4 CORE 对辅助空气和冷却水系统进行预防性维护 E4 CORE 对深度探测系统进行预防性维护 E4 CORE 对环境范围预测系统进行预防性维护 E4 CORE 对消耗性深海温度计 (XBT) 设备进行预防性维护 E4 CORE 对声纳罩增压系统进行预防性维护 E4 CORE 对鱼雷对抗系统进行预防性维护 E4 CORE 对水下通信系统进行预防性维护 E4 CORE 对阀门进行预防性维护 E4 CORE 修理辅助空气和冷却水系统 E4 CORE 修理环境范围预测系统