XiaoMi-AI文件搜索系统
World File Search System实时控制

印度理工学院 KHARAGPUR ...
tv9telugu.com › iit-k-11-01-2023 PDF 2023年1月11日 — 2023年1月11日 空气动力学实时控制以减少阻力、飞机设计、...计算生物学、量子计算、人机交互。
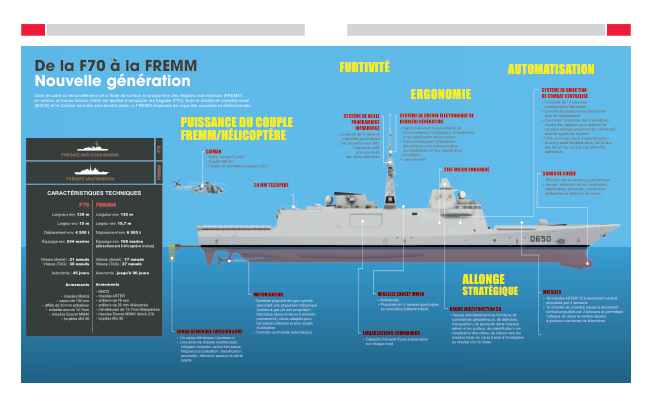
从 F70 到新一代 FREMM
• 由 17 个相同的多功能控制台组成 • 实时控制和协调所有设备 • 集中从传感器收到的所有信息以制定战术情况并允许控制所有武器系统 • 提供高水平的自动化和极大的灵活性,可将战斗任务分配给不同的操作员

与机器视觉集成的高分辨率微射流喷雾器的实时控制,用于精密杂草控制Raja,r。屠杀,哥伦比亚特区; Fennimore,
愿景,深度学习以及机器人和其他技术学,可能有助于减轻对更可持续的农业系统的需求。但是,传统的工业机器人不是为典型农业生态系统的复杂环境而设计的。农业领域中最关键的害虫控制问题之一是杂草控制,这是目前是一项劳动力的任务。因此,自动化杂草控制系统的需求很大。蔬菜场中的机器人内部杂草控制需要机器视觉,作物定位,决策和代理系统。缺乏可靠的技术来检测,定位和分类杂草和作物植物是开发针对特种蔬菜等特种耕作的完全自动化和全面的杂草管理系统的主要技术障碍。在杂草密度中等至高杂草密度的杂草田中,现有的机器人除草机变得混乱,因为它们无法解释过去的几十年,研究人员一直在尝试各种方法来实时区分杂草的杂草 - 杂草 - 杂草浓度。Lee等。 (1999)提出并开发了一个实时机器视觉系统,该系统以3 fps的速度区分了番茄植物和杂草,代表114毫米101毫米的种子线面积,允许杂草控制系统以1.20 kmh 1的速度传播。 番茄植物在75.8%的时间内正确识别,低于所需的准确性。 Lamm等。 (2002)开发了一种基于Lee El al的棉花的精确杂草映射的系统。 Slautter等。Lee等。(1999)提出并开发了一个实时机器视觉系统,该系统以3 fps的速度区分了番茄植物和杂草,代表114毫米101毫米的种子线面积,允许杂草控制系统以1.20 kmh 1的速度传播。番茄植物在75.8%的时间内正确识别,低于所需的准确性。Lamm等。(2002)开发了一种基于Lee El al的棉花的精确杂草映射的系统。Slautter等。的(1999)原型,并达到了88%的歧视精度。(2008)开发了一种多光谱的机器视觉识别系统,以对杂草的生菜作物分类,并获得90.3%的精度。Haff等。 (2011年)后来提出了一个基于X射线的作物检测系统,该系统达到了90.7%的tomatoplantsatthetthervavel speedof1.6kmh 1的检测准确性。 zhangetal。 (2012)提出了一种高光谱成像系统,以实时识别作物植物并将其与杂草区分开。 该系统在区分杂草的作物方面达到了95.8%的准确性。 有许多关于AI,机器学习,深度学习技术的研究工作,以对杂草进行分类(Bah等,2018; Osorio等,2020)。 Osorio等。 (2020)使用多光谱摄像机在生菜场和应用的SVM(支撑矢量机),Yolov3(您只看一次V3)和掩盖r e cnn(基于区域的综合神经网络)中的图像,以在杂草和作物之间进行分类,并在79%,89%,89%,89%,89%,89%,89%,89%,89%的差异Haff等。(2011年)后来提出了一个基于X射线的作物检测系统,该系统达到了90.7%的tomatoplantsatthetthervavel speedof1.6kmh 1的检测准确性。zhangetal。(2012)提出了一种高光谱成像系统,以实时识别作物植物并将其与杂草区分开。该系统在区分杂草的作物方面达到了95.8%的准确性。有许多关于AI,机器学习,深度学习技术的研究工作,以对杂草进行分类(Bah等,2018; Osorio等,2020)。Osorio等。(2020)使用多光谱摄像机在生菜场和应用的SVM(支撑矢量机),Yolov3(您只看一次V3)和掩盖r e cnn(基于区域的综合神经网络)中的图像,以在杂草和作物之间进行分类,并在79%,89%,89%,89%,89%,89%,89%,89%,89%的差异


分散能源白皮书:自适应本地能源社区
具体来说,这是一种技术经济建模工具,能够实时控制和公平共享可再生能源资源,不受物理资产退化和网络约束的影响。技术经济分析的结果表明,与分布式个人拥有的资产相比,共同拥有的资产(社区资产)可以节省更多成本(更高的收益)。这些结果表明,确定公平再分配或分配社区项目中实现的收益非常重要。
Harita Trivedi-工程企业家精神
人类核对机界面(HCMI) - 生物学的设计挑战 - 4个团队•开发了一个集成EMG信号的生物新学系统,用于实时控制蟑螂腿和伺服电机•MATLAB中的实施信号处理和校准;使用CAD设计的机械组件•实现了具有重大统计验证的精确控制(P = 0.0461)并优化的伺服响应
5G 制造 - 数字弹射器
超可靠低延迟通信 (URLLC) – 在远程维护和监控、协作机器人 (cobot) 和联网自动驾驶汽车等新用例的推动下,URLLC 将提供超快速的关键任务连接。这将实现高度准确和可靠的实时数据,这些数据可以在现场和供应链的各个部分进行大规模处理、分析、可视化和操作。这一特性对于具有极高容差要求的制造过程至关重要。接近一毫秒的延迟和非常高的带宽使实时控制制造机器成为可能,从而降低成本并提高质量。

截至 1 月 1 日,会员公司数量为 100 家
施耐德电气 — 引领住宅、楼宇、数据中心、基础设施和工业领域能源管理和自动化的数字化转型。施耐德电气业务遍及全球 100 多个国家,是电源管理(中压、低压和安全电源)和自动化系统领域无可争议的领导者。他们提供集成效率解决方案,结合能源、自动化和软件。在其全球生态系统中,施耐德电气与我们的开放平台上最大的合作伙伴、集成商和开发者社区合作,提供实时控制和运营效率。