XiaoMi-AI文件搜索系统
World File Search System实时控制

混合碰撞避免方法
摘要:在此手稿中,我们考虑轨迹计划和控制中的避免障碍任务。这些任务的挑战在于难以解决最佳控制问题(OCP)的非convex纯状态约束。强化学习(RL)提供了处理障碍限制的更简单方法,因为只需要建立反馈功能。尽管如此,事实证明,我们经常获得持久的训练阶段,我们需要大量数据来获得适当的解决方案。一个原因是RL通常没有考虑到基本动力学的模型。相反,此技术仅依赖于数据中的信息。为了解决这些缺点,我们在本手稿中建立了一种混合和分层方法。虽然经典的最佳控制技术处理系统动力学,但RL专注于避免碰撞。最终训练的控制器能够实时控制动态系统。即使动态系统的复杂性对于快速计算或需要加速训练阶段的复杂性太高,我们也通过引入替代模型来显示一种补救措施。最后,总体方法应用于在赛车轨道上引导汽车,并通过其他移动的汽车进行动态超车。
大脑 - 计算机界面基于稳态视觉诱发电势,使用轮椅控制的快速响应代码模式
摘要:大脑 - 计算机界面(BCIS)广泛用于严重身体残疾患者的控制应用中。一些研究人员的目的是开发实用的脑控制轮椅。基于稳态的视觉诱发电势(SSVEP)的现有脑电图(EEG)基于BCI是为了控制设备控制的。这项研究利用了可靠的现有系统的快速响应(QR)代码视觉刺激模式。使用提出的带有四个可振动频率的视觉刺激模式生成四个命令。此外,我们采用了SSVEP特征提取的相对功率谱密度(PSD)方法,并将其与绝对PSD方法进行了比较。我们设计了实验来验证所提出系统的效率。结果表明,所提出的SSVEP方法和算法在实时处理中产生的平均分类精度约为92%。对于通过基于独立的控制模拟的轮椅,提议的BCI控制需要比键盘控制的时间大约五倍以进行实时控制。使用QR码模式的建议的SSVEP方法可用于基于BCI的轮椅控制。然而,由于长期连续控制,它因视觉疲劳而受到影响。我们将在严重的身体残障人士中验证和增强拟议的轮椅控制系统。
迈向认知自我优化制造系统
摘要:工业控制系统在当今的制造系统中发挥着核心作用。在保持和提高生产能力和生产力的同时,生产系统的复杂性也随之大幅增加,并朝着更加灵活和可持续的方向发展。为了应对这些挑战,需要先进的控制算法和进一步的发展。近年来,基于人工智能 (AI) 方法的发展引起了研究和行业对未来工业控制系统的极大关注和相关性。基于人工智能的方法越来越多地被应用于各种工业控制系统层面,从单个自动化设备到复杂机器的实时控制、生产过程和整个工厂的监督和优化。因此,人工智能解决方案被应用于不同的工业控制应用,从传感器融合方法到新型模型预测控制技术,从自优化机器到协作机器人,从工厂自适应自动化系统到生产监督控制系统。本篇展望论文的目的是概述人工智能方法在不同层次上对工业控制系统的新应用,以提高生产系统的自学能力、整体性能、相关流程和产品质量、资源的最佳利用和工业系统安全性以及对不同边界条件和生产要求的适应能力。最后,讨论了主要的未决挑战和未来前景。
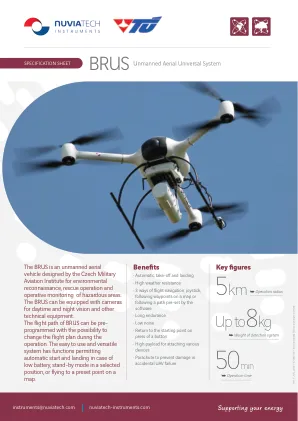
5公里 最多8公斤 - NUVIATech 仪器
产品描述 BRUS 是一种无人机系统,具有先进的导航和操作功能,由远程操作员通过无线连接实时控制。BRUS 无人机主要由碳复合材料制成。独特的设计允许 BRUS 折叠到最小体积,只需放下两个臂并拆卸底盘,所有这些都无需使用工具。BRUS 可以配备多种有效载荷 - 用于快照和视频的相机、热像仪和红外相机以及多个传感器,如辐射监测模块等。BRUS 系统由两部分组成;无人机部分和地面控制站,允许与无人机交互并从传感器接收数据。地面控制站配备了强大的高级导航软件。命令控制由操纵杆或单击触摸屏提供。BRUS 有两种版本:基本版 BRUS 和重型版 BRUS,后者具有更高的性能和有效载荷能力。两种版本均可配备视频模块(日光高清摄像头)或视频 + 红外模块(日光摄像头、红外摄像头和飞行过程中在摄像头之间切换的系统)。该系统设计便于运输和操作。三个臂无需使用任何工具即可折叠,以装入运输箱中,其尺寸允许在普通汽车后备箱中运输。

在任意极化状态下受控全息图
可重编程的元图在物理和信息域之间建立了一个引人入胜的桥梁,可以实时控制电磁(EM)波,因此吸引了世界各地的研究人员的注意力。要控制具有任意极化状态的EM波,希望独立控制一组基集状态,因为具有任意极化状态的入射EM波可以分解为这些基础状态的线性总和。在这项工作中,我们介绍了反射性仪式的完整基础可抵制编码元表(CBR-CM)的概念,该概念可以实现对反射阶段的独立动态控制,同时维持左手圆形极化(LCP)的幅度相同的振幅,并保持相同的振幅。由于LCP和RCP波共同构成了平面EM波的完整基集,因此可以在任意极化波发生率下生成动态控制的全息图。实现了动态可重构的元粒子,以证明CBR-CM在LCP和RCP波下独立控制全息图的纵向和横向作用的强大能力。预计拟议的CBR-CM可以通过多个独立的信息渠道来实现更复杂和高级设备的方法,这可能会为数字EM环境复制提供技术帮助。

使用自主无人机群监测和封锁野火
摘要:无人驾驶飞行器或无人机已成为消防员用于监测野火的设备中不可或缺的一部分。然而,它们仍然通常仅用作远程操作的移动传感平台,由人类飞行员直接实时控制。同时,大量文献强调了自主无人机群在各种态势感知任务中的潜力,包括在环境保护背景下。在本文中,我们介绍了通过数值方法(即蒙特卡罗模拟)进行系统调查的结果。我们报告了对关键参数(例如火势蔓延动力学、观察表面积和群体大小)对无人监督下自主无人机部队性能的影响的见解。我们限制使用无人机进行被动传感操作,目的是为地面上的消防员提供实时态势感知。因此,目标被定义为能够定位模拟火灾事件,然后在其周围建立连续的边界(警戒线),以提供实时数据馈送,例如视频或红外线。特别强调仅使用简单、强大且可实际实施的分布式决策功能,这些功能能够支持群体在追求集体目标的过程中进行自组织。我们的结果证实了上述参数之间的相互作用存在强烈的非线性效应,可以使用经验定律进行近似。这些发现可以根据已知的任务特征和可接受的几率(成功几率)逐案调动足够的资源。
微处理器和微控制器...
指令集和汇编语言编程8086:地址模式,指令集,汇编指令,过程,宏和简单程序,以及涉及逻辑,分支和呼叫指令的简单程序,分类,评估算术表达式,字符串操作。单元-III:I/O接口:8255 PPI,各种操作模式和接口到8086,D/A和A/D转换器,步进电机,DMA控制器8257的交插,内存连接到8086的内存交互,中断为8086,Intrump vector Table Table Sbot,Intrump vate Servarine,Intrump Secress oferine。通信接口:串行通信标准,串行数据传输方案,8251 USART体系结构和接口。单元-IV:微控制器简介:8051微控制器,体系结构,I/O端口,内存组织,地址模式和说明集8051,简单程序,内存连接到8051单位-V:8051单元-V:8051实时控件:实时控制:编程计时器中断,编程外部硬件打断,编程80个编程,以编程为中断,以编程为中断,编程,编程,编程,编程,进行编程,编程。ARM处理器:基本面,注册,当前程序状态注册,管道概念。

电气工程课程清单 2023 届(...
1,4,5 3-4 1 可在任一学期修读。 2 自由选修课总计至少须达到 12 个学分。 3 有关满足专业发展 - 技术问题与解决方案要求的课程列表,请参阅注册处“学术规划”网页上的“专业发展课程”链接。该课程应在顶点设计课程之前完成。 4 建议学生使用选修课来形成专业。请参阅 ECSE 网页以获取专业列表。 5 满足技术和限制选修课的综合要求时,不得使用超过一门独立学习课程。 6 可用 ENGR-1100 工程分析简介代替。 7 希望将 ENGR-1600 材料科学作为数学/科学选修课的学生必须选修 CHEM-1100。 8 每年秋季和春季学期提供。学生应在满足先决条件后选修这些课程。至少 128 个学分 限制选修课 任何 3 或 4 个学分的课程,名称为 ECSE-4xxx 或 ECSE-6xxx。 技术选修课 任何 3 或 4 个学分的工程、数学或科学课程,4000 级或更高。 实验室选修课 ECSE 4090 机电一体化 ECSE-4130 电力工程实验室 ECSE-4220 VLSI 设计 ECSE-4760 实时控制与通信 ECSE-4770 计算机硬件设计 ECSE-4790 微处理器系统 ENGR-4710 制造过程与系统实验室 I

基于脑机接口的无人机控制,利用头部运动的陀螺仪数据
摘要 本研究探索了利用人体头部运动的陀螺仪数据通过脑机接口 (BCI) 控制 DJI Tello 四轴飞行器的可能性。在本研究中,收集了 4 名佩戴 Emotiv Epoc X 耳机的志愿者之间的 100 多个陀螺仪记录,这些记录捕捉了 X、Y 和 Z 列(正式称为 GyroX、GyroY、GyroZ)。Emotiv Epoc X 数据捕捉了与 DJI Tello 四轴飞行器导航相关的每个参与者的头部运动(左、右、静止和向前)。数据经过彻底的处理和分析,使用 Microsoft Excel 在图表中显示出独特的模式。然后开发了一种 Python 条件算法来解释陀螺仪数据,以确定每个头部运动方向,此外还使用来自 Tello SDK 2.0 用户指南库的 Tello 无人机命令。通过集成 Python Lab Streaming Layer (LSL) 实现 Emotiv Epoc X 和 Tello 四轴飞行器之间的持续数据交换,实现了实时控制。实验结果证实,通过陀螺仪数据和头部运动成功控制 Tello 四轴飞行器,运行准确率为 98%,展示了该技术在无人机控制方面的潜力。

能源管理的经济模型预测控制
为了满足可持续能源系统、多样化能源资源和电力市场自由化的需求,全球能源行业正经历分布式能源 (DER) 的大规模渗透。为了最大限度地发挥这些资产的效益,DER 可以聚合在虚拟发电厂 (VPP) 中并作为单一系统运行。在这项工作中,我们考虑一个由连接到高压 (HV) 电网的级联水电站 (CHPS) 聚合并集成连接到中压 (MV) 电网的大量可变可再生能源 (VRES) 组合而形成的 VPP。然后,我们解决了在复杂的技术约束、安全约束和由于故障导致 VPP 资源不可用的情况下,在联合能源和辅助服务市场上实现 VPP 利润最大化的问题。首先,我们提出了一个 VPP 的通用模型。其次,我们提出了一个两级顺序 VPP 能源管理策略,该策略由长期竞价优化和通过经济模型预测控制 (EMPC) 的实时控制组成,两者都接收预测作为输入。模拟采用法国综合公司 Compagnie Nationale du Rhône (CNR) 提供的真实模型和实际预测。与传统参考跟踪 MPC (RTMPC) 相比,EMPC 可将 VPP 利润提高 6%,并在发生故障时增强辅助服务的提供。