XiaoMi-AI文件搜索系统
World File Search System实时计算

rarita-schinginger田地的纠缠熵
我们研究了d¼4minkowski时空中自由费米子场理论的纠缠熵的通用对数系数。作为热身,我们通过对D¼2半线的尺寸减小以及随后在晶格上进行数值实时计算来重新审视无质量自旋1 = 2场情况。出乎意料的是,该面积系数差异以径向离散化,但对于由相互信息引起的几何正则化是有限的。所得的通用对数系数 - 11 = 90与文献一致。对于自由质量自旋 - 3 = 2场,Rarita-Schwinger场,我们还对半行进行了尺寸降低。除了省略最低的总角动量模式外,降低的哈密顿量与自旋1 = 2一致。这给出了一个通用对数系数-71 = 90。我们讨论了无应力能量张量的自由高自旋场理论的通用对数系数的物理解释。

在具有速度障碍的大型动作空间中为移动机器人计划移动机器人的蒙特卡洛
动态环境中的抽象运动计划是一项具有挑战性的机器人任务,需要避免碰撞和实时计算。最新的在线方法作为速度障碍(VO)保证安全的本地计划,而基于强化学习或图形离散化的全球计划方法在计算上效率低下或不可证明是碰撞的安全性。在本文中,我们将蒙特卡洛树搜索(MCT)与VO结合起来,以修剪不安全的动作(即相撞速度)。以这种方式,即使在非常大的动作空间(60个动作)中,我们可以进行极少的MCT模拟计划,比使用许多模拟的纯MCT获得更高的累积奖励和更低的计算时间。此外,由于与VO的动作修剪,我们的方法可以保证避免碰撞,而纯MCT则没有。在本文中铺平了在实际机器人和多代理分散运动计划上计划MCT计划的道路。
人形机器人 Pyrène 的反应式行走
该团队已经开发出一种步行控制方案,并在之前的人形机器人 HRP-2 上成功测试,验证了强大的步行模式生成器,该生成器速度足够快,可以进行实时计算,并能够自动定位其脚步(应用示例见 [Stasse et al., 2009] 和 [Ramirez-Alpizar et al., 2016])。然而,在新的 Pyr`ene 机器人上,由于比 HRP-2 和其系列的第一个原型(Talos 模型)更重,臀部灵活性等各种技术问题使其在当前的步行模式和控制方案下行走不稳定。因此,已经实施了稳定器并进行了部分测试。实习旨在通过研究稳定器和步行模式生成器来改进控制方案的当前状态,包括实时验证控制以允许机器人进行远程操作。

实时数据管理中的问题
Stankovic 认为 [52] 实时计算不是高性能计算,而是有时间约束的计算。实时系统的正确性标准包括关于计算必须完成的时间的明确陈述。为了设计一个满足时间约束的系统,必须能够分析系统以确定其时间消耗。商用现货 (COTS) 数据库技术不能以这种方式进行分析,因为该技术的生产商不会发布分析(如果他们有的话)或代码,以保护它。似乎没有使用任何商用现货 DBMS 成功部署的实时数据库应用程序的示例。这可能反映了从业者太忙而无法发布他们的实践这一事实。然而,一些成功的工业研发努力“如果投入使用就会奏效”已被注意到[26, 44]。一家为英国海军生产系统的英国软件公司开发了实时数据库管理软件[58],但英国人认为这是一种竞争优势,不愿讨论它。
实时数据管理中的问题
Stankovic 认为 [52] 实时计算不是高性能计算,而是有时间限制的计算。实时系统的正确性标准包括对计算时间的明确说明。为了设计一个满足时间限制的系统,必须能够分析系统以确定其时间消耗。商用现货 (COTS) 数据库技术不能以这种方式进行分析,因为该技术的生产商不会发布分析(如果他们有的话)或代码,以保护它。似乎没有使用任何商用现货 DBMS 成功部署实时数据库应用程序的例子。这可能反映了从业者太忙而无法发布他们的实践。然而,一些成功的工业研发工作“如果投入使用就会奏效”,这一点已被注意到 [26, 44]。一家为英国海军生产系统的英国软件公司开发了实时数据库管理软件[58],但英国人认为这是一种竞争优势,因此不愿意讨论它。
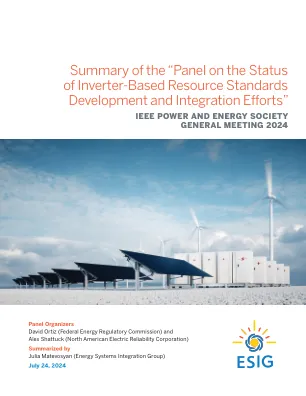
“逆变器资源标准开发和集成工作现状座谈会”摘要
• Dominion Energy Virginia 正在将短路比与相互作用因子 (SCRIF) 的伪实时计算构建到自动化运营规划工具应用程序中,该应用程序每 10 分钟检索一次能源管理系统 (EMS) 快照。它与 EMS 是分开的,但它使用节点断路器实时模型。目标是了解 SCRIF 是否实际上是预测控制器/逆变器不稳定问题的有效指标,这些问题在实时同步相量数据中已经出现。如果是,SCRIF 研究将在停电前纳入运营规划时间范围。目前,Dominion Energy Virginia 并未系统地开展 EMT 研究,但它会根据需要进行研究,并正在探索运营和规划范围内对 EMT 研究的进一步要求。功率流和相量域动态研究都是作为设施互连过程的一部分进行的。

通过随机分散模型预测控制
摘要 - 连接和自动化的车辆(CAV)网络中的通信延迟显着影响基于连接的优化协调,增加了碰撞风险和降解系统性能。现有方法受到实时计算挑战,过时的数据,可扩展性约束和管理不确定性的困难的限制。本文提出了一种随机分散的模型预测控制(SDMPC)框架,以通过合并一种新颖的随机近似方法来模拟不确定性,以减轻通信延迟的不利影响。我们的方法提供了对安全限制的紧密概率约束,从而确保了准确的训练有素的预测并改善了协调。仿真结果表明,与在各种通信延迟条件下的常规方法相比,所提出的SDMPC框架减少了平均轨迹偏差,并降低了碰撞风险。这些改进使SDMPC成为大型CAV网络的有效解决方案,从而提高了安全性和效率。

通过随机分散模型预测控制
摘要 - 连接和自动化的车辆(CAV)网络中的通信延迟显着影响基于连接的优化协调,增加了碰撞风险和降解系统性能。现有方法受到实时计算挑战,过时的数据,可扩展性约束和管理不确定性的困难的限制。本文提出了一种随机分散的模型预测控制(SDMPC)框架,以通过合并一种新颖的随机近似方法来模拟不确定性,以减轻通信延迟的不利影响。我们的方法提供了对安全限制的紧密概率约束,从而确保了准确的训练有素的预测并改善了协调。仿真结果表明,与在各种通信延迟条件下的常规方法相比,所提出的SDMPC框架减少了平均轨迹偏差,并降低了碰撞风险。这些改进使SDMPC成为大型CAV网络的有效解决方案,从而提高了安全性和效率。

60,第 244 号/星期三...
信息技术 高性能全光网络 抗干扰通信链路 下一代信号光网络架构 集成语音和数据 信息安全 (INFOSEC) 语音处理 高性能计算 高性能通信 需求规范和分析 实时计算 无线移动网络 行为检测 机器学习 信息过滤和融合 集成互联网协议 (IP) 和异步传输模式 (ATM) 多播 可靠多播 带定向天线的无线网络 传感器网络 通信网络模拟 带宽管理 (服务质量) 高保证软件 基于分布式网络的战斗管理 支持具有单线程和多线程架构的统一和非统一内存访问的高性能计算 分布式、安全和移动信息基础设施 基于模拟的虚拟现实 高端、渐进式 HDTV 图像处理和分发 防御性信息战 虚拟现实/移动增强现实 3D 多模式交互 用于模拟的模型集成 (物理、环境、生物、心理) 指挥决策支持 数据融合
预测控制器实际工作负载的方法综述...
实时安全监控 (RTSM) 方法允许评估和预测国家空域系统 (NAS) 中的安全裕度,以帮助预防事件和事故,而不是被动缓解它们。在 RTSM 中,NAS 使用状态变量建模,安全指标根据这些状态变量定义。安全指标已分为天气相关、空域相关和人为相关。许多制定的人为相关安全指标需要估计控制器工作量才能计算。但是,这种计算并不简单。因此,在本报告中,我们进行了文献调查,以确定能够计算控制器工作量的不同因素并对这些因素进行分类。接下来,我们将描述为确定一组最小因素而进行的研究,这些因素可以正确评估控制器工作量。最后,我们调查了评估所选因素与管制员对其工作量的主观评估之间的相关性的方法。根据此调查,我们提出了有利于实时计算和预测管制员工作量的因素,并讨论了这些计算所需的数据源的状态。