XiaoMi-AI文件搜索系统
World File Search System对翼身
EAA AirVenture 吊索高翼
内部空间非常适合两名体型较大的飞行员,宽度比赛斯纳 172 稍大。与 Sling High Wing 相比,一个显著的区别是垂直稳定器比低翼飞机高 20 厘米。Sling High Wing 和 Sling TSi 的显著区别在于发动机罩右侧的大型 NACA 管道,它将空气送入发动机的大容量中冷器。弓形复合材料主起落架支柱是 Sling Aircraft 的标准配置,并连接到单体式机身下侧,与 Sling TSi 相比变化很小。复合材料门关闭牢固,在原型机上,它们安装得非常好。门方便地铰接在机身两侧的前部。后排座椅提供了充足的舒适度,座椅后面有一个行李舱。前轮也没有变化,允许与 Sling TSi 一样向前安装防火墙。 ZU-SHW 是一个原型机,我听说该飞机的完成度达到了 95%,但是团队希望生产模型的完成度达到 100%,因此在他们乐意将 Sling High Wing 投入批量生产之前,还需要进行一些“调整”。

失速状态下旋翼性能和载荷计算...
使用 1/10 比例 CH-47B/C 型转子的风洞试验数据研究失速条件下的转子行为,该风洞试验提供了一组测试条件,从未失速到轻度失速到一些深度失速条件,涵盖了很宽的前进比范围。在风洞中测量的转子性能与 NASA/Army UH-60A 空气载荷计划期间测量的主转子性能相似,尽管这两个转子完全不同。分析 CAMRAD II 已用于预测转子性能和载荷。全尺寸翼型试验数据针对雷诺数效应进行了校正,以便与模型比例转子试验进行比较。计算出的功率系数与雷诺数校正翼型表的失速以下测量值显示出良好的相关性。计算中使用了各种动态失速模型。波音模型显示升力在低推进比时增加,而 Leishman-Beddoes 模型在 µ = 0.2 时显示扭矩相关性优于其他模型。然而,动态失速模型通常对转子功率和扭矩预测的影响很小,尤其是在较高的推进比下。

阿卜杜勒·卡拉姆的《火焰之翼》
对我的生活产生了深远的影响。因此,这本书也是对我父母和直系亲属的感谢,以及对我在学生时代和职业生涯中幸运遇到的老师和导师的感谢。这也是对我年轻同事不懈的热情和努力的致敬,他们帮助我们实现了共同的梦想。艾萨克·牛顿关于站在巨人肩膀上的名言对每一位科学家都适用,我当然要从杰出的印度科学家那里得到巨大的知识和灵感,其中包括维克拉姆·萨拉巴伊、萨蒂什·达万和布拉姆·普拉卡什。他们在我的生活中和印度科学史上扮演了重要角色。1991 年 10 月 15 日,我满 60 岁。我决定将退休后的时间用于履行我在

六翼天使空间指数
亮点 2023 年投资额为 68 亿美元(2022 年为 69 亿美元) 23 年第四季度投资额为 20.4 亿美元(23 年第三季度为 16 亿美元) Seraphim 投资指数排名第 267 位(23 年第三季度排名第 220 位) Seraphim 交易指数排名第 303 位(23 年第三季度排名第 282 位) 第四季度达成的最大交易额为 3 亿美元 – Firefly 第四季度平均交易规模为 2200 万美元(23 年第三季度为 2400 万美元) 第四季度交易规模中值为 650 万美元(23 年第三季度为 410 万美元) 2023 年并购交易数为 30 笔(2022 年为 22 笔)

一个极其简单的多翼混沌系统
摘要 - 多项式函数一直是多翼混沌系统(MWCSS)的电路实现和工程化的主要限制。为了消除这种瓶颈,我们通过在Sprott C系统中引入正弦函数来构建一个简单的MWC,而无需多项式函数。理论分析和数值模拟表明,MWC不仅可以使用任意数量的黄油量产生多量器的吸引子,而且还可以通过多个ple方式来调整黄油液的数量,包括自我振荡时间,控制参数和初始状态。为了进一步探索所提出的MWC的优势,我们使用可循环可用的电子元素实现了其模拟电路。结果是,与传统的MWCS相比,我们的电路实施大大减少了电子组件的消耗。这使MWCS更适合许多基于混乱的工程应用程序。更重要的是,我们提出了MWC在混沌图像加密中的应用。直方图,相关性,信息能量和钥匙灵敏度表明,简单的图像传感方案具有很高的安全性和可靠的加密性能。最后,我们开发了一个可编程的门阵列测试平台,以实现基于MWCS的图像加密系统。理论分析和实验结果都验证了所提出的MWC的可行性和可用性。

具身人工智能中的多样性、公平性和包容性
然而,表达和实施这些思考是困难的,特别是在机器人和人工智能 (AI) 等新的复杂领域。为了这个目的,本书收集了体现人工智能的多样性、公平性和包容性 (DEI4EAI) 项目的思考、见解和工具。本书面向从事体现人工智能工作并有兴趣为更公平和公正的未来做出贡献的学生、研究人员、设计师、开发人员和社会利益相关者。所有那些被称为普通的东西实际上都是文化性的:它们代表着价值观、信仰和叙述,影响我们如何收集和使用数据、如何设计算法、如何定义代理、如何塑造人工智能体现、如何设计交互以及我们如何定义体现人工智能干预。尽管角色和能力不同,设计师、研究人员和更广泛的利益相关者(如政策制定者和社区)都有责任反思他们的价值观、观点、偏见和刻板印象如何影响具体化的人工智能技术。这很重要,因为孤立的实践会影响我们评估行为风险和危害的能力。为了防止设计有害和不充分的技术,需要以反思和开放的态度审视叙述、实践和方法,以转变思维方式。
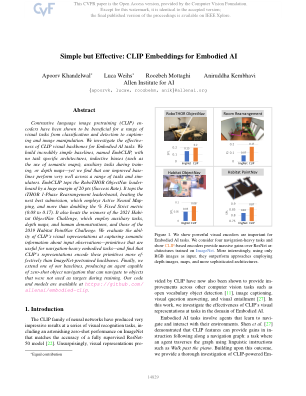
简单但有效:具身人工智能的 CLIP 嵌入
对比语言图像预训练 (CLIP) 编码器已被证明对从分类和检测到字幕和图像处理等一系列视觉任务有益。我们研究了 CLIP 视觉主干对 Embodied AI 任务的有效性。我们构建了非常简单的基线,称为 EmbCLIP,没有任务特定的架构、归纳偏差(例如使用语义图)、训练期间的辅助任务或深度图——但我们发现我们改进的基线在一系列任务和模拟器中表现非常出色。EmbCLIP 在 RoboTHOR ObjectNav 排行榜上以 20 分(成功率)的巨大优势名列前茅。它在 iTHOR 1-Phase Rearrangement 排行榜上名列前茅,击败了采用主动神经映射的第二佳提交作品,并且 % Fixed Strict 指标增加了一倍多(0.08 到 0.17)。它还击败了 2021 年 Habitat ObjectNav 挑战赛的获胜者,该挑战赛采用了辅助任务、深度图和人工演示,以及 2019 年 Habitat PointNav 挑战赛的获胜者。我们评估了 CLIP 的视觉表示在捕获输入观察的语义信息方面的能力——这些原语对于导航繁重的具身任务很有用——并发现 CLIP 的表示比 ImageNet 预训练的主干更有效地编码了这些原语。最后,我们扩展了我们的一个基线,生成了一个能够进行零样本物体导航的代理,它可以导航到训练期间未用作目标的物体。我们的代码和模型可以在 https://github.com/allenai/embodied-clip 获得。

走向分布式和具身化的认知解释
摘要 多重外部表征 (MER) 对于科学、数学和工程学的实践和学习至关重要,因为这些领域中研究和控制的现象和实体通常无法被感知和采取行动。因此,MER 在这些领域的推理中发挥着双重构成作用。首先,MER 代表想象中的现象和实体,从而使科学研究成为可能。其次,与上述内容相关的是,与 MER 的感觉运动和想象互动使得涉及这些现象和实体的集中认知操作成为可能,例如心理旋转和类比变换。这两个构成作用表明,获得科学、数学和工程学的专业知识需要发展转化和整合该领域 MER 的能力,同时在想象中对 MER 所代表的现象和实体进行操作。因此,这种整合外部和内部表征及其操作的核心能力(称为表征能力 (RC))对于科学、数学和工程学的学习至关重要。但是,目前尚无关于这一核心过程的一般说明。我们认为,鉴于 MER 发挥的上述两个构成作用,表征能力的理论解释需要一个明确的模型来说明认知系统如何与外部表征相互作用,以及想象力如何
