XiaoMi-AI文件搜索系统
World File Search System导航方式
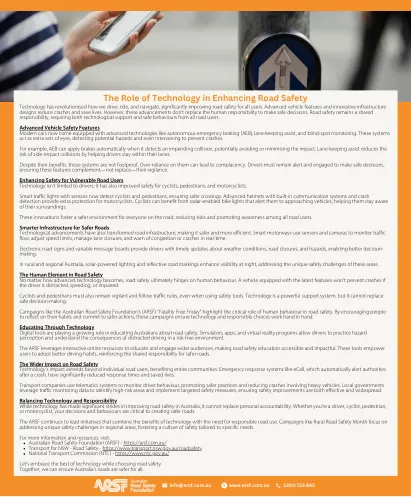
技术在增强道路安全方面的作用
技术彻底改变了我们的驾驶,骑行和导航方式,从而显着提高了所有用户的道路安全性。高级车辆功能和创新的基础设施设计减少了崩溃并挽救生命。但是,这些进步并不能取代人类做出安全决定的责任。道路安全仍然是共同的责任,需要所有道路使用者的技术支持和安全行为。
2024 年英国生物奥林匹克竞赛试卷 1 和 2
第 1 部分(共 6 部分) *Cataglyphis fortis* 是一种生活在突尼斯沙漠的蚂蚁。科学家研究了蚂蚁的导航方式。他们抓到正在返回巢穴的蚂蚁,要么剪掉它们的腿的末端(左),要么给它们装上支柱(中),要么让它们保持原样(右),然后再将它们放回原处。*C. fortis* 的腿长超过巢穴。*树桩长低于巢穴。*腿正常的蚂蚁成功找到了巢穴。
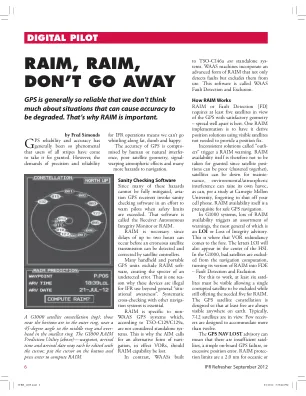
押韵,押韵,不要走开
健全性检查软件由于许多此类危害无法完全缓解,航空 GPS 接收器会调用健全性检查软件,在超出安全限制时向飞行员发出警告。该软件称为接收器自主完整性监视器或 RAIM。RAIM 是必需的,因为在卫星控制器检测和纠正错误的卫星传输之前可能会发生长达两个小时的延迟。许多手持和便携式 GPS 设备不包含 RAIM 软件,从而造成未检测到错误的阴影。这就是为什么这些设备除了一般的“态势感知”之外,不得用于 IFR 使用的原因之一。必须与其他导航系统进行系统性交叉检查。RAIM 特定于非 WAAS GPS 系统,根据 TSO-C129/C129a,这些系统不被视为独立系统。这就是为什么 AIM 呼吁在 RAIM 功能丧失时采用替代导航方式(实际上是 VOR)的原因。相比之下,WAAS 的

基于性能的导航
所有导航系统都可以用性能来描述。例如,地面导航辅助设备(如 VOR)可提供可测量的性能水平,该性能水平以可接受的导航公差为依据。PBN 操作同样基于导航性能,但性能概念根本不同。基于地面导航辅助设备的运行取决于辐射信号的性能以及飞机准确利用该信号的能力,而在基于性能的导航中,性能本身是指定的,并且导航系统需要满足最低性能水平。原则上,任何达到指定导航性能水平的导航方法都是可以接受的。然而,在实践中,在某些情况下需要特定的导航系统才能满足特定导航规范的要求。例如,RNP 4 要求强制携带 GNSS,因为没有其他当前导航系统可以满足导航规范的要求。至少在理论上,如果有另一种导航方式可以满足 RNP 4 的性能要求而无需 GNSS,那么 GNSS 的要求就可以从导航规范中删除。 2. 绩效评估

为持久的火星训练启用长而精确的驱动器
本文介绍了一种进行全球本地化的新型船上方法,其中许多已经成功地证明了毅力。我们的概括技术使用修改后的人口普查转换,以实现稳健和实用的子米全球本地化精度,其性能与人为指导的本地化相匹配,从前两年半的任务中,平均不到0.5米以内,没有异常值。我们使用安装在毅力漫游器中的Ingenuity直升机基站上的快速处理器来执行本地化。它最初是为了与创造力进行协调交流。这项工作开发了界面和缓解辐射方法,使其可以用作Rover的协调员。该系统旨在限制操作的影响,并且不需要每日投入到Rover操作员,而不是是否执行全局本地化,但如果需要,也允许战略配置选项。我们讨论了从开发和部署这项新技术在飞行任务中所汲取的经验教训,并描述全球本地化如何增加科学回报并改变行星移动机器人的导航方式。

delan:通过跨模式对比学习的视觉和语言导航的双级别对齐
抽象的视觉和语言导航(VLN)要求代理通过遵循自然语言指导在看不见的环境中导航。为了完成任务完成,代理需要对齐和整合各种导航方式,包括指令,观察和导航历史记录。现有作品主要集中在融合阶段的跨模式关注上,以实现这一目标。然而,不同的单键编码器产生的模态特征位于自己的空间中,从而导致跨模式融合和决策的质量下降。为了解决这个问题,我们通过跨模式对比度学习提出了一个指定框架(Delan)框架。该框架旨在在融合之前对齐各种与导航相关的方式,从而增强跨模式的交互和动作决策。具体来说,我们将融合前的对准分为双重级别:根据其语义相关性,指令历史级别和地标性观察水平。我们还重建了双级指令,以适应双级对准。作为融合前对齐的训练信号非常有限,使用自我监督的对比学习策略来实施不同方式之间的匹配。我们的方法与大多数现有模型无缝集成,从而改善了各种VLN基准测试的导航性能,包括R2R,R4R,RXR和CVDN。
批准 I 类和... 的标准
4 运行概念 4.1 最低标准的分类和适用性 4.2 起飞 4.3 着陆 4.3.1 进近和着陆概念与目标 4.3.1.1 运行安全评估 4.3.1.2 主要和辅助导航方式及所需导航性能 (RNP) 4.3.1.3 使用 ICAO 标准导航设备 4.3.1.4 标准仪表进近程序 (SIAPS) 4.3.1.5 “大角度进近”和进近路径下降角限制 4.3.1.6 “正常机动”考虑 4.3.1.7 非正常事件或配置 4.3.1.8 复飞安全 4.3.2 ILS、GLS 或 MLS (xLS) 仪表进近操作 4.3.3 ILS、GLS 或 MLS (xLS) 以外的仪表进近4.3.4 DA(H),MDA(H)或RA的适用性4.3.4.1将DA(H)应用于I类4.3.4.2在I 4.3.4.3应用DA(H)或等效(即INTER MARKER)的应用中,将MDA(H)应用于类别II 4.3.4.4.4.4。4.3.5 能见度和 RVR 最低标准 4.3.6 着陆的能见度评估和 RVR 等效性 4.3.7 I 类运行和最低标准的一般要求 4.3.7.1 I 类定义、背景、分类和一般标准 4.3.7.2 “xLS”程序 - 最低标准不小于 200 英尺 DA(H) 4.3.7.3 “3D”RNAV 程序 - 最低标准不小于 200 英尺 DA(H) 4.3.7.4 “3D”RNAV 程序 - 最低标准不小于 250 英尺 DA(H) 4.3.7.5 “2D”RNAV 程序(例如基于 VOR/DME 的 RNAV 或基于 GPS 的 RNAV)- 最低标准不小于 250 英尺 MDA(H) 4.3.7.6 其他程序比 xLS 或 RNAV 更宽的距离(例如 VOR、NDB、LOC、后方航向 LOC 或 ASR 程序) - 最低标准不小于 250 英尺 DA(H) 4.3.7.7 其他特殊程序或授权 4.3.7.8 先前批准的 I 类运行或使用先前或新的 I 类标准 4.3.8 II 类要求 4.3.8.1 一般 II 类要求 4.3.8.2 II 类 DA(H) 的规范 4.3.8.3 II 类最低标准的资格不小于 100 英尺 DA(H)