XiaoMi-AI文件搜索系统
World File Search System尽快恢复
EN-374恢复
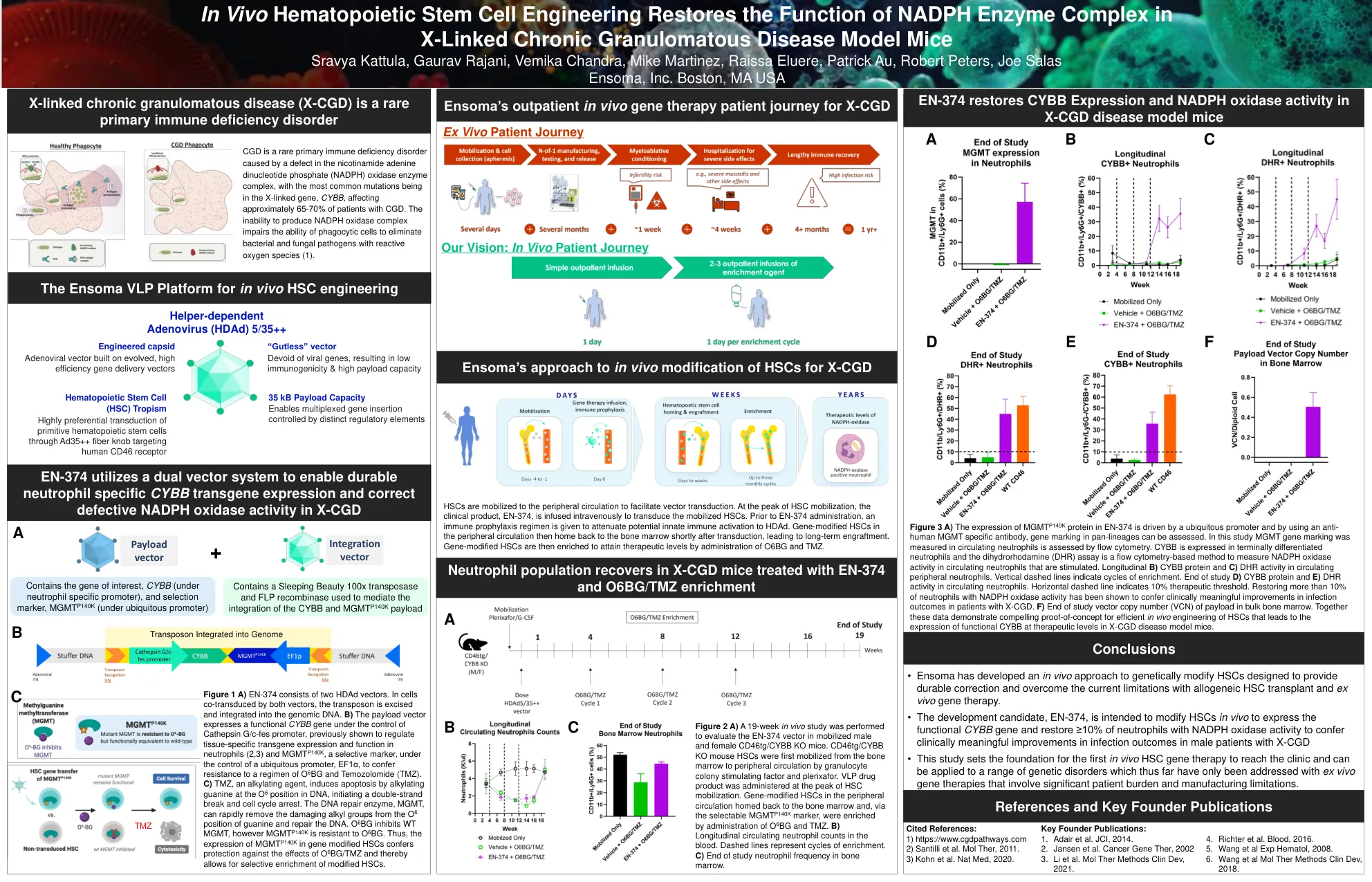
图3 a)在EN-374中,MGMT P140K蛋白的表达是由无处不在的启动子驱动的,并且通过使用抗人MGMT特异性抗体,可以评估泛元素中的基因标记。在这项研究中,通过流式细胞仪评估了在循环中性粒细胞中测量MGMT基因标记。cybb在末端分化的中性粒细胞中表达,二氢二胺(DHR)测定是一种基于流式细胞仪的方法,用于测量刺激的循环中性粒细胞中NADPH氧化酶活性。纵向b)Cybb蛋白和C)循环外周中性粒细胞中的DHR活性。垂直虚线表示富集的周期。研究结束d)循环中性粒细胞中的Cybb蛋白和e)DHR活性。水平虚线表示10%的治疗阈值。恢复超过10%的具有NADPH氧化酶活性的中性粒细胞已显示出X-CGD患者的感染结果的临床意义改善。f)散装骨髓中有效载荷的研究矢量拷贝数(VCN)。这些数据共同证明了HSC的有效体内工程的概念概念证明,从而导致X-CGD疾病模型小鼠的治疗水平上功能性CYBB的表达。

通过恢复策略
摘要 - 离线目标条件的强化学习(GCRL)的目的是通过脱机数据集的稀疏重新解决目标解决目标任务。虽然先前的工作已经阐明了代理商学习近乎最佳策略的各种方法,但在处理复杂环境(例如安全限制)中处理各种约束时,这些方法会遇到限制。其中一些方法优先考虑目标,而无需考虑安全性,而其他方法则以牺牲培训效率为代价而过度关注安全性。在本文中,我们研究了限制离线GCRL的问题,并提出了一种称为基于恢复的监督学习(RBSL)的新方法,以完成具有各种目标的安全至关重要的任务。为了评估方法性能,我们基于具有随机定位的障碍物的机器人提取环境建立基准测试,并使用专家或随机策略来生成离线数据集。我们将RBSL与三种离线GCRL算法和一种离线安全RL算法进行比较。结果,我们的方法在很大程度上可以执行现有的最新方法。此外,我们通过将RBSL部署在真正的熊猫机械手上来验证RBSL的实用性和有效性。代码可在https://github.com/sunlighted/rbsl.git上找到。

艺术恢复
II。 机器人技术在仓库中的重要性1)在仓库中部署机器人技术的主要好处之一是工人安全的重大改善。 传统仓库行动要求员工举起和运输重型纸箱和手提袋,从而增加了肌肉骨骼受伤的风险。 自动化机器人可以接管这些身体上苛刻的任务,从而减少工作场所伤害并促进更安全的工作环境。 2)提高的生产率和效率机器人旨在以精确的方式处理重复且耗时的任务。 通过自动化常规活动,例如采摘,分类和运输商品,人类工人可以专注于高价值任务,例如质量控制和过程优化。 此转变可以提高整体生产率,并允许企业更有效地满足客户需求。 3)减少工作场所事故的仓库和配送中心通常会经历大量的车辆交通,包括叉车和卡车,为工人创造了危险的环境。 引入机器人技术可以最大程度地减少人类参与危险区域,从而减少事故并提高整体运营安全性。 4)操作中的一致性和可预测性,机器人技术的关键优势之一是它们提供一致的性能的能力。 与人类工人不同,机器人不会遇到疲劳,从而确保在整个操作时间内保持稳定的工作流程。 这种一致性使仓库经理可以准确预测输出水平并优化劳动力计划。II。机器人技术在仓库中的重要性1)在仓库中部署机器人技术的主要好处之一是工人安全的重大改善。传统仓库行动要求员工举起和运输重型纸箱和手提袋,从而增加了肌肉骨骼受伤的风险。自动化机器人可以接管这些身体上苛刻的任务,从而减少工作场所伤害并促进更安全的工作环境。2)提高的生产率和效率机器人旨在以精确的方式处理重复且耗时的任务。通过自动化常规活动,例如采摘,分类和运输商品,人类工人可以专注于高价值任务,例如质量控制和过程优化。此转变可以提高整体生产率,并允许企业更有效地满足客户需求。3)减少工作场所事故的仓库和配送中心通常会经历大量的车辆交通,包括叉车和卡车,为工人创造了危险的环境。引入机器人技术可以最大程度地减少人类参与危险区域,从而减少事故并提高整体运营安全性。4)操作中的一致性和可预测性,机器人技术的关键优势之一是它们提供一致的性能的能力。与人类工人不同,机器人不会遇到疲劳,从而确保在整个操作时间内保持稳定的工作流程。这种一致性使仓库经理可以准确预测输出水平并优化劳动力计划。5)替代传统传送带系统传送带系统长期以来一直是仓库自动化的主食,但它们需要大量的基础设施投资和空间。自动移动机器人(AMR)和自动化导向车辆(AGV)提供了灵活的替代方案,可以使动态材料运动无需固定途径。这种适应性使仓库随着需求波动而有效地扩展操作。

covid-19恢复
1个传染病系,生物医学研究所,瑞典哥德堡大学Sahlgrenska Academy,哥德堡大学; 2瑞典哥德堡的萨尔格伦斯卡大学医院VästraGötaland地区传染病系; 3瑞典哥德堡大学Sahlgrenska学院生物医学研究所实验室医学系; 4 Sahlgrenska Academy神经科学与生理学研究所精神病学和神经化学系,瑞典哥德堡大学; 5沃伦贝格分子与转化医学中心,瑞典哥德堡大学哥德堡大学; 6英国伦敦大学学院神经病学研究所痴呆研究中心神经退行性疾病系; 7奥地利因斯布鲁克医科大学生物化学研究所,奥地利因斯布鲁克; 8瑞典MölndalSahlgrenska大学医院临床神经化学实验室; 9英国伦敦大学学院英国痴呆研究所,英国伦敦; 10香港神经退行性疾病中心,中国香港; 11威斯康星州威斯康星州医学与公共卫生学院,威斯康星大学麦迪逊分校,美国威斯康星州麦迪逊,美国威斯康星州;和12 Meso Scale Diagnostics,LLC,美国马里兰州罗克维尔

尽快:对模拟和现实世界进行一致学习敏捷的人形全身技能
训练补偿动力不匹配的三角洲(残留)动作模型。然后用Delta动作模型集成到模拟器中,以ASAP微调进行预训练的策略,以有效地与现实世界动力学对齐。我们在三种转移方案中尽快评估了ISAACGYM到Isaacsim,Isaacgym到Genesis和Isaacgym,以及真实世界的G1人类人体机器人。我们的方法显着提高了各种动态运动的敏捷性和全身协调,与Sysid,DR和Delta动力学学习基准相比,跟踪误差减少了。尽快实现了以前难以实现的高度敏捷运动,这证明了在桥接模拟和现实世界动力学中的三角洲动作学习的潜力。这些结果表明,可以开发出更具表现力和敏捷的人形生物的有希望的SIM到真实方向。
SPE04M60H-AG
图 6:欠压保护时序图(高侧) Fig 6:Undervoltage protection sequence diagram (High side) b1 : 电源电压上升:当该电压上升到欠压恢复点,在下一个欠压信号被执行前该线路将启动运行。 b1: Power supply voltage rise: When the voltage rises to the undervoltage recovery point, the line will start running before the next undervoltage signal is executed. b2 : 正常运行 : MOSFET 导通并加载负载电流。 b2: Normal operation: MOSFET is turned on and load current is applied. b3 : 欠压检测 (UV BSD ) 。 b3: Undervoltage detection (UV BSD ). b4 : 不管输入是什么信号, MOSFET 都是关闭状态。 b4: No matter what signal is input, MOSFET is off. b5 : 欠压恢复 (UV BSR ) 。

确保保护、恢复和...
基金的设立——收购、进一步处理、安置、文件整理;对于用户服务——接收并满足要求;关于维护信息检索装置——指标、地形目录等的编制和使用;实际上是为了存储、保存和保护图书馆藏书。存储需要深厚的技术、物理、化学、生物、社会、心理、教育学、法律等知识。在基金的生物安全问题上,真菌学家(真菌专家)和昆虫学家(昆虫专家)可以提供最大的帮助;关于基金的消防安全问题,该领域的专家;关于基金安全的法律责任问题——律师等