XiaoMi-AI文件搜索系统
World File Search System尽量避免
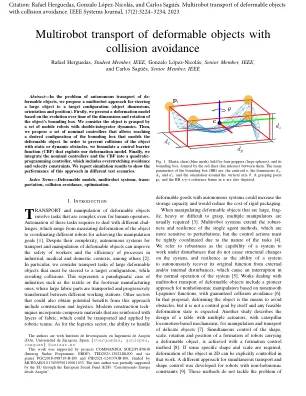
避免碰撞的可变形物体的多动物传输
摘要 - 在自动运输可塑造对象的问题中,我们提出了一种多机器人方法,将大对象转向目标配置(对象维度,方向和位置)。首先,我们基于对象边界框的尺寸和旋转时间的演化提出了一个变形模型。我们认为该对象是由一组带有双积体动力学的移动机器人抓住的。然后,我们提出了一组名义控制器,允许达到建模可变形对象的边界框的所需配置。为了防止对象与静态或动态障碍物的碰撞,我们制定了利用我们变形模型的控制屏障函数(CBF)。最后,我们将标称控制器和CBF集成到二次编程控制器中,其中包括过度拉伸的回避和速度约束。我们报告模拟结果,以显示在不同的测试方案中这种方法的性能。

基于视觉的飞机检测与跟踪,用于检测和避免
我们解决这个问题的方法遵循两阶段流程:(1)自我运动估计和(2)检测和跟踪。这两个阶段都是全卷积神经网络,可以扩展到高分辨率输入。它们在 Amazon Prime Air 发布的标记数据集上进行训练,该数据集包含 330 多万张飞机、直升机、无人机和其他飞行物体的图像。我们还开发了自己的飞机数据收集系统,并设计了用于飞行中遭遇的定制视觉 DAA 有效载荷。通过对现实世界数据进行实证评估,我们的方法与两种基线检测和跟踪架构进行了比较,结果显示我们的方法更胜一筹。在 DAA 行业标准 (ASTM F3442/F3442M - 20) 的背景下分析我们的定量结果,我们还表明,所提出的方法可以满足某些类别无人机的视觉 DAA 监视要求,这些无人机的最低巡航速度为 60-90 节,最小转弯速率为 21-31 度/秒,最小爬升率为 250-500 英尺/分钟。


系统产品的超线性成本避免效应...
开发技术。但是,现在可以证明,配置多个共享资产的成本避免是超线性的 - 即总成本避免超过了单独使用每个共享资产所带来的成本总和。也就是说,配置(例如)需求和代码的产品线将避免比基于代码和基于需求的成本避免的总和更多的成本。此外,我们还观察到产品组合中产品数量的超线性效应。本文探讨了这些影响发生的原因,并从文献中最大和最成功的产品线之一 AEGIS 武器系统提供了这些影响存在的分析和实证证据。结果可能会为系统工程领域的产品线工程经济学带来新的见解。

避免和减轻休闲娱乐压力的临时方法
信息和指导说明:2022 年避免和减轻威勒尔娱乐压力的临时方法 1. 背景 1.1 利物浦市区 (LCR) 内的六个地方当局 1 以及西兰开夏郡议会正在联合制定一项娱乐缓解战略 (LCR RMS),该战略将使地方当局能够履行其法律义务,保护欧洲野生动物保护区免受与住房开发和旅游相关的娱乐活动的影响。LCR RMS 将对 LCR 内国际重要自然保护区的游客和娱乐压力管理采取更广泛的战略方法,并将管理地方当局如何计划减轻娱乐压力对国际重要指定保护区的危害。 1.2 LCR RMS 要到 2023 年 6 月才能完工,因为需要收集新的调查证据。时间表不可避免地受到了 Covid-19 的影响。然而,迄今为止在新兴 RMS 上的工作表明: • 与娱乐的组合影响有关的问题很复杂; • 目前,在缺乏战略方针和商定的评估方法的情况下,开展项目级 HRA 以满足立法要求非常耗时; • 需要委托进行额外的证据收集,这在 LCR RMS 证据基础报告 2 中有所规定; • 项目级缓解措施的有效性很难获得证据;因此 • 解决这些复杂问题需要
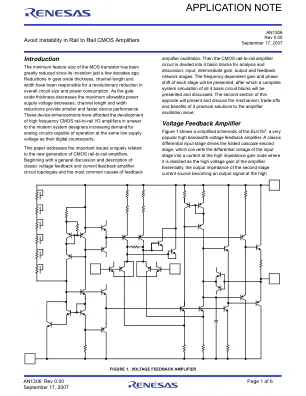
AN1306:避免轨对轨 CMOS 放大器不稳定
电感器是一种具有频率相关阻抗特性的电气元件;电感器在低频时表现出低阻抗,在高频时表现出高阻抗。虽然“理想”运算放大器输出阻抗特性为零,但“实际”放大器的输出阻抗是电感性的,并且像电感器一样随着频率的增加而增加。EL5157 的输出阻抗如图 2 所示。使用运算放大器的应用中的一个常见挑战是驱动电容负载。之所以有挑战性,是因为运算放大器的电感输出与电容负载一起形成 LC 谐振槽拓扑,其中电容负载电抗与电感驱动阻抗一起导致当反馈围绕环路闭合时产生额外的相位滞后。降低相位裕度会导致放大器振荡的可能性。振荡时,放大器会变得非常热,并且可能会自毁。针对这一挑战,有几个非常著名的解决方案。1) 最简单的解决方案是在输出端串联一个电阻,以强制反馈来自放大器的直接输出,同时隔离无功负载。这种方法的代价是牺牲负载上少量的输出电压摆幅。2) 另一个直接的解决方案是应用“缓冲网络”。缓冲网络是一个与电容负载并联的电阻和电容,在负载上提供电阻阻抗以减少输出相移;提供额外的稳定性。
在合作军事行动中避免平民伤害:- AOAV
Frank Ledwidge 是一名律师,曾担任过巴尔干半岛、伊拉克和阿富汗的军官。他是《失去小规模战争》(耶鲁大学出版社,2011 年,第二版 2017 年)、《血战》(耶鲁大学出版社,2018 年)和《空战》(牛津大学出版社,2018 年)的作者。他目前是朴茨茅斯大学法律与战略高级讲师。Stuart Casey-Maslen 是比勒陀利亚大学的名誉教授。他最近的出版物包括《海牙法解读:武装冲突法下的敌对行为》(Hart,2018 年)、《军备控制与裁军法》(牛津大学出版社,2021 年)和《国际法下的生存权:解释手册》(剑桥大学出版社,2021 年)。Mark Goodwin-Hudson 是前军官,曾在巴尔干半岛、伊拉克和阿富汗服役。在阿富汗,他是北约负责平民伤亡减轻和调查的负责人。此后,他一直担任 CIVIC(冲突中平民中心)顾问、联合国军事顾问,目前在司法快速反应名册上。Lydia Day 是停火平民权利中心的宣传官,她领导停火组织在英国军事问责方面的工作。她曾在多个非政府组织工作,涉及国防治理、平民保护和人权问题。

避免 IC 互连中因迁移而导致的故障
摘要 — 迁移引起的金属互连性能下降日益威胁着集成电路的可靠性。迁移导致的故障风险不仅在每个新技术节点中都在上升,而且还制约着互连结构的小型化。除了直流线路(例如供电网络)、信号和时钟线路也日益因迁移而性能下降。本文总结了我们目前在避免迁移引起的集成电路故障方面的知识。在介绍和讨论迁移机制之后,我们将重点关注日益增长的电迁移敏感性和热迁移日益增加的影响。展望未来,我们将回顾将迁移约束和缓解措施纳入布局综合的新型 IC 设计策略。索引术语 — 电迁移、应力迁移、热迁移、可靠性、物理设计、迁移稳健性

移动机器人的自主导航和避免碰撞:分类和审查
自主移动机器人(AMR)在各个部门中变得越来越重要。他们协助人类完成复杂,危险或重复的任务。最初是为了提高工业环境中的生产率和安全性,其范围已大大扩大。最初关注工业操纵器的路径计划[1],AMRS现在使用高级算法在没有碰撞的情况下导航。这种扩展使他们能够在工业环境以外的多样化和动态环境中运作[2],[3]。尽管有很大的进步,但现有的自动移动机器人(AMR)的导航策略通常仍集中在特定领域:陆地,空中和水生。这些策略通常采用从感知到控制的分层方法,每种方法都针对不同的操作环境,例如工业环境[4],不均匀的地形[5],[6]和水下探索[7],[8]。所有这些应用都表明缺乏可以在所有域中无缝集成的统一框架,本文旨在解决问题。通过采用模块化包,提出的分类可以增强组件的可重复性和互操作性,从而促进自主导航所有域的更轻松地集成[9],[10]。本文介绍了一种新的全面分类系统,旨在简化澳大利亚导航的各个方面。该系统充当基本框架,组织了阶段,模块和层之间的复杂关系。它提高了自主导航策略的理解和执行,提供了清晰的
阅读所有信息并仔细遵循说明,以避免错误和遗漏
_______________________________________________________________________________________ _______________________________________________________________________________________ _______________________________________________________________________________________ _______________________________________________________________________________________