XiaoMi-AI文件搜索系统
World File Search System尾缘

基质辅助细胞移植,用于治疗兔模型中的缘干细胞缺乏症
1眼疾病系,I.M.Sechenov第一莫斯科州立医科大学,8-2,Trubetskaya Street,119991,俄罗斯莫斯科,俄罗斯2号病理学部,眼科培养基,克拉斯诺夫眼科疾病研究所,11a Rossolimo St.,俄罗斯莫斯科,119021,119021,俄罗斯3 R&D Dempption,3 R&D Dempption,Imtek ltd.1 15a,3rd.,3rd.俄罗斯莫斯科; spdomo@gmail.com 4科尔佐夫发育生物学研究所俄罗斯科学学院,26,Vavilova St.,Vavilova St.,119334,俄罗斯,俄罗斯5号,俄罗斯5号眼科基础研究实验室,Krasnov眼疾病研究所,Krrossolimo St.院士院士的心脏病学中心E.I.俄罗斯联邦卫生部Chazov,Academika Chazova St.,15A,121552莫斯科,俄罗斯7个细胞止血和血栓形成实验室,DMITRY ROGACHEV国家医学研究中心,儿科血液学和免疫学,癌症和免疫学eosidak@gmail.com
一种用于放射诱导皮肤损伤的新型鼠尾模型
预印本(未经同行评审认证)是作者/资助者。保留所有权利。未经许可不得重复使用。此版本的版权所有者于 2025 年 1 月 15 日发布。;https://doi.org/10.1101/2025.01.10.632342 doi:bioRxiv 预印本
用于 EC145 尾梁检查的自动空气耦合超声波技术
摘要。通常,复杂航空航天部件的超声波检测采用喷射技术。然而,水耦合会带来压力变化、气泡、水垢、藻类和机械腐蚀等缺点。因此,最好采用非接触式技术,以避免这些缺点。空气耦合超声波技术可以通过特殊传感器结合特殊发射器和接收器技术来减少空气和固体之间的巨大声学失配。尽管进行了这些优化,但测试频率必须低于 1 MHz。已经发表的研究表明,低超声频率对于检查 CFRP 夹层部件(即使使用水耦合)是必要的。空气耦合超声波检测技术已经适用于测试 CFRP 蜂窝夹层结构。由于传感器在复杂部件的相对侧垂直对齐,因此需要十轴机器人扫描系统。本文介绍了欧洲直升机公司自 2011 年起在多瑙沃特运行的自动空气耦合机器人超声波成像系统的初步结果和细节。该项目是欧洲直升机公司德国分公司、Robo-Technology、EADS Innovation Works、Ing. Büro Dr. Hillger 和 Ostertag 之间的合作项目。
DNA识别和通过羟基甲基-γ尾钳肽核酸诱导的基因组修饰
未通过同行评审认证)是作者/资助者。保留所有权利。未经许可就不允许重复使用。此预印本的版权持有人(该版本发布于2023年7月9日。; https://doi.org/10.1101/2023.07.08.548209 doi:biorxiv Preprint

d2 维重尾随机环境中的非定向聚合物
d P ( S ) := 1 ZN,ce − c |RN |。该模型已得到充分研究(从开创性的工作 [ 21 ] 开始),现在已得到充分理解:在高 PN,c 概率下,RN 接近于具有明确半径 ρ d,c N 1 / ( d +2) 的无洞 ad 维球(参见 [ 11 , 4 , 20 ])。当 ω 非平凡时,模型 ( 1.1 ) 描述了自吸引(若 h > 0 )或自排斥(若 h < 0 )聚合物与随机环境相互作用。在每个位点,聚合物链与无序状态相互作用恰好一次,这可能模拟一种屏蔽相互作用,即一个单体在特定位点“吸收”所有相互作用。我们选择坚持这种设置,以便继续 [ 5 , 25 ] 中发起的研究,该研究将该模型视为受其范围惩罚的随机游走的无序版本。

设计、测试和验证 COTS 尾纤模拟输出 InGaAs APD 接收器
检测低功率和高功率光的短脉冲 能够在恶劣环境和很宽的温度范围内工作 大动态范围 在感应到明亮目标后,快速过载恢复以检测后续信号 承受高光功率密度,提高探测器的损伤阈值 除了这些标准之外,许多 LRF 和 LiDAR 系统设计都会受益于在传输和接收过程中使用光纤,以改善系统热管理并降低整体系统噪音 (1) 。许多国防应用都需要商用现货 (COTS) 组件,因为 COTS 更容易获得且更具成本效益。CMC 推出了一系列新的 COTS 尾纤 SMT 封装铟镓砷 (InGaAs) 雪崩光电二极管 (APD) LIDAR/LRF 接收器,276-339832-VAR,根据 MIL-STD 规格进行设计、测试和验证。这款 COTS APD 接收器提供的性能可以更准确地检测更长距离的小目标。坚固的光纤尾纤封装有利于节省空间和简化系统集成,同时满足 MIL-STD 环境操作条件。
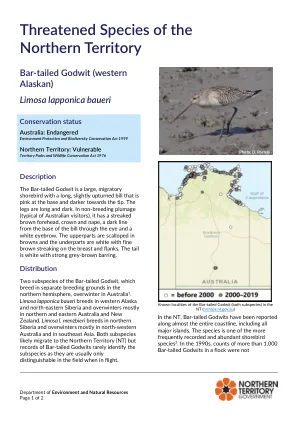
酒吧尾戈德维特(西阿拉斯加)limosa lapponica baueri
酒吧尾的戈德维特的两个亚种,它们在北半球的单独繁殖地繁殖,澳大利亚越冬1。Limosa Lapponica Baueri在阿拉斯加西部,西伯利亚东北部以及越过澳大利亚北部,澳大利亚和新西兰的越野繁殖。limosa l。 Menzbieri在西伯利亚北部和越过澳大利亚西北部和东南亚繁殖。这两个亚种都可能迁移到北领地(NT),但钢筋尾godwits的记录很少识别亚种,因为它们通常只能在飞行时才能区分。
Construction-Specifications.pdf - 多佛镇
标准安装 3/4 英寸计量家用服务(单一设置) 供水服务安装 标准安装 1 英寸计量家用服务 预制仪表坑详图 水质入口详图 入口/雨水管安装详图 典型街道横截面,无路缘 典型街道横截面,有路缘 典型铺装路段,乡镇街道 典型铺装路段,停车场 典型沥青路面修复详图 铺装凹槽详图 路缘终点 普通水泥混凝土路缘 斜面混凝土路缘详图 路面基层排水沟 凹陷路缘详图 典型车轮挡板布局,90° 停车 _ 90° 停车详图 典型车轮挡板布局,60° 停车 预制混凝土车轮挡板 90° 残疾人停车位详图 单个残疾人停车位详图 残疾人停车位标记 沥青步行区 混凝土人行道方向箭头 树木种植和放样方法 常绿树种植和放样方法 灌木种植方法

街道规划审查清单 1.pdf
o 标明所有需要我们审核和批准的路权和停车设施(无论是拟议的还是现有的)的尺寸。尺寸应包括长度、宽度、高度、人行道上方的垂直间隙以及与路缘线的距离 o 以每英尺 1/8 英寸或每英尺 1/10 英寸的最小比例绘制 在平面图上标明 § 14-301(9)(b)(露天停车场和停车场)或 §14-804(自行车停车场)的哪些部分需要街道部门批准。所有车道路缘切口,相对于路缘线,均标明尺寸(宽度)并标记为“拟议”或“现有”。所有无信号路缘切口将按照标准细节 SC0105(标准车道细节)进行设计和建造 为所有路缘切口提供转弯平面图,清晰显示所有行车道和停车车道。提供一份完整的 PennDOT 表格 M-950S(车道视距测量)副本,并在分区规划图上显示计算出的视距三角形,用于规划图上显示的所有路缘切口(现有或拟议,在城市或州路线上)。根据标准细节 PP0101(道路符号和缩写标准)提供道路信息

带稳定性增强器的无尾飞行器增量反步滑模轨迹控制
摘要:本文提出了一种增量反步滑模(IBS)控制器,用于无尾飞机的轨迹控制,该控制器具有未知干扰和模型不确定性。所提出的控制器基于无尾飞机的非线性动力学模型。提出了一种限制虚拟控制输入速率和幅度的稳定性增强器(SE)。稳定性增强器由两层组成。当虚拟控制输入接近边缘时,将激活第一层 SE 来修改轨迹跟踪误差;当虚拟控制输入超出边缘时,第二层 SE 将降低控制增益以确保虚拟控制输入尽快落在边缘内。在 SE 的帮助下,增量控制方法可以扩展到外环控制,而无需考虑内环系统的动态特性。此外,提出了一种状态导数自适应估计器,与 IBS 相结合,使控制器表现出良好的鲁棒性。最后,给出了两个仿真。第一次仿真表明系统对外部干扰和模型不确定性不敏感,第二次仿真证明了 SE 的有效性。