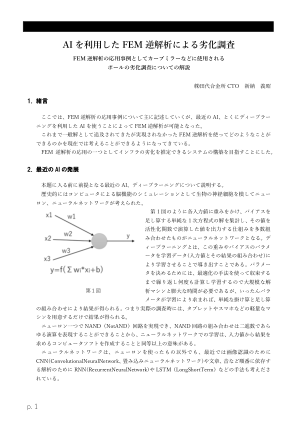
XiaoMi-AI文件搜索系统
World File Search System层次化

层次运动计划和离线稳健模型的自动驾驶预测控制
摘要 - 在恶劣条件下在复杂情况下驾驶车辆是自动驾驶汽车(AV)的最大挑战。为了解决这个问题,我们在复杂的场景中使用前主动转向系统提出了层次运动计划和稳健的控制策略,并在各种湿滑的道路粘附系数中,同时考虑车辆不确定的参数。通过智能驾驶员模型(IDM)考虑并以车辆跟随模型的形式考虑人类车辆(HVS)的行为(HVS)。然后,在上层中,运动计划者首先使用人工电位场(APF)算法来生成最佳轨迹,例如,路标,边界和静态/动态障碍物,例如道路标记,边界和静态/动态障碍。为了在下层跟踪生成的最佳trajectory,通过应用线性矩阵不等式(LMI)优化方法,使用线性参数变化(LPV)系统来实现离线约束的输出反馈鲁棒模型预测性控制(RMPC),以确保对模型参数的鲁棒性不适合模型不限制。更重要的是,通过增强系统模型,我们提出的方法称为离线RMPC,与三种现有的RMPC方法相比,具有出色的效率,例如,偏置式挡板offline RMPC,在线rmpc,在线rmpc和离线rmpc无需增强模型(离线rmpc w/o am),在不线rmpc w/o am)(均改进了计算时间),并改进了计算时间和添加时间。

ITS Connect 助力基于人工智能的路边基础设施
住友电气工业株式会社 电装株式会社 丰田汽车株式会社 丰田通商株式会社 松下电器产业株式会社 日立制作所 三菱电机株式会社 瑞萨电子株式会社 地址:东京都港区港南 2-3-13 新川 Front 大厦 网站:https://www.itsconnect-pc.org/ 成立日期:2014 年 10 月 28 日
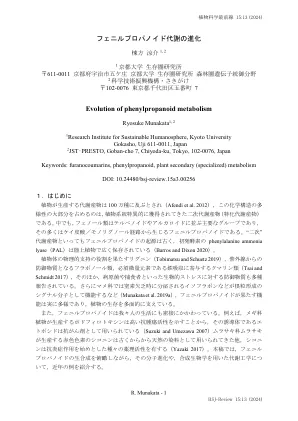
苯丙烷代谢的进化
图1。Mizutani等人编辑的肉桂酸/单胞醇途径和衍生型苯丙烷的示例,“学习植物化学的基础知识”。酶缩写:4Cl,4-Coumaroyl CoA连接酶; c3'h,p -coumaroyl shikimate/quinate 3-羟化酶; C4H,肉桂4-羟化酶; CAD,肉桂醇脱氢酶; ccOaomt,咖啡因coA o-甲基转移酶; CCR,肉桂二氧化碳减少; comt,caffeate o -methyltransferase; CSE,咖啡酰shikimate酯酶; F5H,试染5-羟化酶; HCT,羟基nnamoyl COA:光泽羟基霉素转移酶; PAL,苯丙氨酸氨裂解酶;塔尔,酪氨酸氨裂解。

HG-CAD:计算机辅助设计中的材料预测和建议的层次图
为了支持智能计算机辅助设计(CAD),我们介绍了机器学习体系结构,即HG-CAD,该体系结构通过使用层次图表表示,建议通过联合学习身体和装配级特征来提出装配体材料。特别是,我们将材料预测和建议过程作为节点级别的分类任务,这是CAD模型的新型分层图表示,其低级图形捕获了身体几何形状,可捕获体内几何形状,这是一个高级图形的组合图,是组件的高级图表,并具有批处理掩码的随机化随机化效果。这使我们的网络能够从人体和组装水平汇总几何和拓扑特征,从而导致竞争性能。对Fusion 360画廊组装中提议的体系结构的定性和定量评估 - 显示了我们方法的可行性,表现出色的计算机视觉和人类基线,同时在应用程序场景中显示出希望。提议的HG-CAD体系结构统一了多模态CAD特征的处理,编码和联合学习,这表明有潜力作为设计自动化的建议系统,并提供了未来工作的基准。[doi:10.1115/1.4063226]
基于空间表征语义层次的机器人探索与绘图策略
许多科学家 [Lynch,1960;Piaget 和 Inhelder,1967;Siegel 和 White,1975] 已经观察到认知地图被组织成连续的层,并提出对大规模环境的有用且有力的描述的核心要素是拓扑描述。分层模型包括从局部感官信息中识别和辨认地标和地点;路线控制知识(从一个地方到另一个地方的过程);连通性、顺序和包含的拓扑模型;以及形状、距离、方向、方位以及局部和全局坐标系的度量描述。看来,认知地图的分层结构是人类在大规模空间中稳健表现的原因。我们的方法试图将这些方法应用于机器人探索和地图学习问题。我们定性方法中对环境的核心描述是拓扑模型,如 TOUR 模型 [Kuipers,1978]。该模型由一组节点和弧组成,其中节点代表环境中可识别的位置,弧代表连接它们的行进路径。节点和弧是根据机器人的感觉运动控制能力程序性定义的。度量信息添加到拓扑模型之上。

哺乳动物前脑中多个时间尺度的层次梯度
皮质回路的许多解剖和生理特征,从突触的生物物理特性到不同神经元类型之间的连接模式,都表现出从感觉区域到联想区域的层级轴的一致变化。值得注意的是,静息状态下神经活动的时间相关性尺度(称为内在时间尺度)在灵长类动物和啮齿动物中都沿着这一层级系统地增加,类似于空间受体场的规模和复杂性不断增加。然而,任务相关活动的时间尺度如何在大脑区域间变化,以及它们的层级组织是否在不同哺乳动物物种中一致出现仍未得到探索。在这里,我们表明,内在时间尺度和任务相关活动的时间尺度在猴子、大鼠和小鼠的皮质中都遵循类似的层级梯度。我们还发现,这些时间尺度在皮层和基底神经节中以类似的方式共同变化,而丘脑活动的时间尺度比皮层时间尺度短,并且不符合其皮层投影预测的层次顺序。这些结果表明,皮层时间尺度的层次梯度可能是哺乳动物大脑皮层内回路的普遍特征。

资本化报告
1. 引言 1.1 概述 本资本化报告的目的首先是提供坚实的数据和方法基础,以促进与 InnoVagroWomed 项目区域合作伙伴的行动计划相关的决策。本报告总结了主要活动,并就将女性纳入职场或创建性别创业公司提出了建议和结论。 1.2 项目概述 地中海地区的两岸都存在着女性赋权和女性劳动力参与率低的共同趋势。InnovAgroWoMed 项目旨在通过利用农业食品部门的潜力(该行业与地中海盆地的文化特征密切相关)来促进女性参与和创业,并在创新和增长方面显示出巨大的未开发潜力。尽管西班牙和意大利等国家在农业食品领域的增长水平相对较高,但女性参与率很低,但中东和北非地区的农业业务仍然分散,女性就业率低。该项目将重点关注两个欧洲地区(西班牙瓦伦西亚和意大利西西里岛)和两个中东和北非地区(突尼斯贝雅和梅德宁以及巴勒斯坦),这些地区被认定为适合在农业食品领域实施和推广可持续价值模式:农村社会创新 (RSI)。RSI 重新定义了组织和社区之间的界限,通过寻求经济、社会和环境可持续性、平衡传统与创新以及明确寻求地方社区发展来应对更广泛的社会挑战。