XiaoMi-AI文件搜索系统
World File Search System开箱
程序
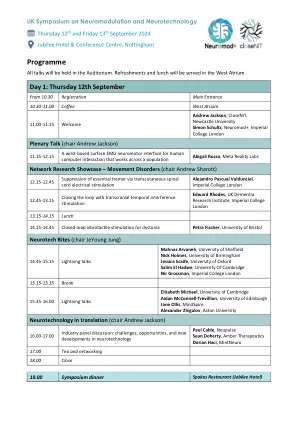
Abigail Russo 是 Meta Reality Labs 的一名研究科学家,她正在研究使用非侵入式腕戴式脑机接口扩展人类运动能力的策略。她在哥伦比亚大学师从 Mark Churchland 攻读博士学位,研究了自愿运动过程中的运动皮层网络功能,借鉴了人工神经网络的见解。 演讲题目:一种适用于整个人群的人机交互腕式表面肌电图神经运动接口 描述:我们描述了一种非侵入式神经运动接口的开发,该接口允许使用表面肌电图 (sEMG) 进行计算机输入。我们开发了一个高灵敏度和强大的硬件平台,可以轻松戴上/脱下,以感应手腕上的 sEMG 并将有意识的神经运动命令转换为计算机输入。我们将此设备与一个经过优化的基础设施配对,可以收集来自数千名同意的参与者的训练数据。这使我们能够开发通用的 sEMG 神经网络解码模型,该模型具有跨人群的高性能开箱即用泛化能力(测试用户在连续导航任务中的平均性能:0.5 次目标获取/秒;离散手势检测任务:0.9 个手势/秒;手写任务:19.6 个字/分钟)。
使用 Luigi 分析工作流对分布式资源进行分析自动化的设计模式
摘要。在粒子物理学中,工作流管理系统主要用作蒙特卡罗事件生成等专用领域的定制解决方案。然而,执行数据分析的物理学家通常需要手动控制各自的工作流程,这很耗时,而且经常导致特定工作负载之间没有记录的关系。我们介绍了 Luigi Analysis Workflows (Law) Python 包,它基于最初由 Spotify 开发的开源流水线工具 Luigi。它为任意规模和复杂性的分析建立了通用的设计模式,并将重点从执行转移到定义分析逻辑。Law 提供了构建块来无缝集成可互换的远程资源,但并不局限于特定的基础设施选择。特别是,它鼓励并实现了分析算法与运行位置、存储位置和软件环境的分离。为了满足端到端 HEP 分析的复杂需求,Law 支持在 WLCG 基础设施(ARC、gLite)以及本地计算集群(HTCondor、LSF)上执行作业,通过 GFAL2 库通过最常用协议进行远程文件访问,以及支持 Docker 和 Singularity 容器的环境沙盒机制。此外,这种新颖的方法最终旨在实现开箱即用的分析保存。Law 完全独立于实验,并且是开源开发的。它已成功用于 t¯ tH 截面测量,并使用 CMS 实验寻找双希格斯玻色子的产生。

p1110-eval-01
概述了用于电池充电的LifetimePower®能量收集开发套件是一个完整的演示和开发平台,用于从RF Energy(无线电波)无线地为电池充电(无线电波)。它被设计为与应用程序一起使用,并配置为开箱即用的操作。电池充电板利用P1110B Powerharvester接收器,该接收器将RF Energy转换为直流电源。PowerSpot®发射器或TX91501-3W发射器是RF能量的来源,均为915MHz。其他从850-950 MHz运行的RF能源也可以用作电源(例如,UHF RFID读取器)。电池充电板接收RF Energy,将其转换为DC,然后为车载电池充电。该套件还包括两个可以连接到电池充电板上的BLE无线电板。与手表或信用卡电池充电板结合使用时,测得的充电电流和电池电压通过蓝牙传输到移动设备,并显示在随附的应用中。这使用户可以同时测试电池充电板上的两种配置。P1110-EVB也包含在套件中。P1110-EVB包含一个评估板和天线,用于使用P1110B PowerHarvester接收器进行测试和开发。像电池充电板一样,它将RF能量转换为直流电源,该功率可以存储在电池或电容器中,或用于直接为电路供电。它包括两种不同的天线配置。

开始使用适用于 Linux* 的英特尔® 人工智能分析工具包
• 英特尔 ® 针对 PyTorch* 的优化:英特尔 ® oneAPI 深度神经网络库 (oneDNN) 包含在 PyTorch 中,作为深度学习的默认数学内核库。 • 英特尔 ® 针对 PyTorch 的扩展:英特尔 ® 针对 PyTorch* 的扩展通过最新特性和优化扩展了 PyTorch* 功能,从而在英特尔硬件上进一步提升性能。 • 英特尔 ® 针对 TensorFlow* 的优化:此版本将 oneDNN 中的基元集成到 TensorFlow 运行时中,以加速性能。 • 英特尔 ® 针对 TensorFlow 的扩展:英特尔 ® 针对 TensorFlow* 的扩展是基于 TensorFlow PluggableDevice 接口的异构高性能深度学习扩展插件。此扩展插件将英特尔 XPU(GPU、CPU 等)设备带入 TensorFlow 开源社区,以加速 AI 工作负载。 • 英特尔 ® 针对 Python* 的分发版:开箱即用,获得更快的 Python 应用程序性能,几乎不需要更改代码。此发行版与英特尔 ® oneAPI 数学核心函数库和英特尔 ® oneAPI 数据分析库等英特尔 ® 性能库集成。 • 英特尔 ® Modin* 发行版(仅通过 Anaconda 提供),您可以使用这个智能的分布式数据框库(其 API 与 pandas 相同)在多节点之间无缝扩展预处理。只有通过使用 Conda* 软件包管理器安装英特尔 ® 人工智能分析工具包才能使用此发行版。 • 英特尔 ® Neural Compressor:在流行的深度学习框架(如 TensorFlow*、PyTorch*、MXNet* 和 ONNX*(开放神经网络交换)运行时)上快速部署低精度推理解决方案。 • 英特尔 ® Scikit-learn* 扩展:使用英特尔 ® oneAPI 数据分析库(oneDAL)无缝加速您的 Scikit-learn 应用程序。

特斯拉的创新文化方法
特斯拉的创新文化方法Michael Profitera Barry University,美国Mostafa Sayyadi澳大利亚管理学院,澳大利亚摘要在我们在2023年在澳大利亚悉尼的BHP Billiton Managers培训研讨会上的咨询经验,我们要求他们列出创新文化的特征。我们发现,这家澳大利亚跨国公司的许多经理列出了诸如知识勇气,风险建设以及灵活和非等级结构的特征。我们认为这是一种创新文化的好开端,但我们还添加了以下宗旨,以推动公司迈向更多的创新和创造力。所有员工的承诺更加承诺从开箱即用,提供较低层次的更多支持,赋予前线人士的能力,更平坦的结构以及使用指导委员会领导变革。这些是我们从特斯拉的创新文化方法中学到的宗旨。我们发现,缺乏对领导者责任的不正确理解是创新的发展和维护失败的原因之一。创新文化的发展和维护是领导者的主要职责之一。对文化和创新的一种简单看法,因为只有愉快而有吸引力的实践清单才是领导者的疏忽。因此,今天不保证过多的官僚主义和机械文化。最终创新。在本文中,我们将以强大的创新文化为例。我们将专注于特斯拉,这不仅是因为它是创新文化中最好的,而且因为它在这一商业和文化凝聚力方面确实是动态的。最后,根据特斯拉的发现,将提出一种用于创新文化的适用模型和高管建议。

校准和代码语言模型的正确性
摘要 - 机器学习模型被广泛使用,但通常也可能是错误的。用户将受益于可靠的指标,即是否应信任给定模型的给定输出,因此可以做出合理决策是否使用输出。例如,输出可以与置信度度量相关联;如果这种置信度度量与正确性的可能性密切相关,则据说该模型是良好校准的。良好的置信度措施可以作为理性,逐步决策的基础,以了解使用生成的代码时需要多少审查和护理。校准已经在主要非生成中进行了研究(例如,分类)设置,尤其是在软件工程中。但是,生成的代码通常可能是错误的:给定的代码,开发人员必须决定是否直接使用,在仔细审查强度变化或丢弃模型生成的代码后使用。因此,卡尔 - 对生成环境至关重要。我们做出了一些贡献。我们开发了一个框架来评估代码生成模型的校准。我们考虑了几个任务,正确性标准,数据集和方法,并发现我们测试的大而生成的代码模型并未得到很好的开箱即用。然后,我们展示如何使用标准方法(例如PLATT缩放)改进校准。我们的贡献将在语言模型生成的当前使用代码中提供更好地校准的决策,并为将来的研究提供了一个框架,以进一步改善软件工程中生成模型的校准方法。由于Platt缩放率取决于正确性数据的事先可用性,因此我们评估了PLATT缩放在软件工程中的适用性和概括性,讨论其具有良好实际使用潜力的设置以及不存在的设置。索引项 - LLS,校准,置信度度量

国防研究与发展组织“技术发展基金”挑战
印度国防研究与发展组织 (DRDO) 的技术发展基金 (TDF) 将组织一场关于“敢于梦想 5.0”计划启动的网络研讨会。会议将由 TDF 主任主持。技术发展基金 (TDF) 在促进国防技术进步的创新与协作方面发挥了重要作用。TDF 取得的成就包括成功举办了国防加速研讨会,印度人民党部长出席了研讨会,TDF 旗下共批准了 80 个项目。这些举措为尖端国防技术的发展做出了重大贡献,重点是自力更生和创新。“敢于梦想”是一项针对新兴技术的计划,旨在响应印度总理纳伦德拉·莫迪 (Narendra Modi) 提出的“自力更生印度”的号召,推动个人、初创企业和微型和中小型企业在国防和航空航天技术领域的创新。尊敬的 Raksha Mantri 于 2024 年 10 月 18 日启动了 Dare To Dream 5.0 竞赛。本次竞赛旨在推动我们的工程界(包括学生和专业人士)将最先进的技术应用于国防和安全,释放颠覆性和开箱即用的想法。与以前的版本一样,已经定义了几个主题,有一个开放类别,创新者和技术梦想家可以提出下一代技术和系统。参与者的唯一资格是在技术方面有远大的梦想,是印度国民或 DPIIT 认可的初创企业或在 MSME 部注册的 MSE。网络研讨会将以 Dare To Dream 5.0 创新大赛和 TDF 计划简介为特色,随后由 DRDO TDF 团队主持问答环节,TDF 主任出席。网络研讨会的详细信息如下,以小组成员身份参与:

具有物理信息神经网络的多尺度模拟
主管:本·莫斯利(Ben Moseley)关键字:多尺度模拟,物理知识的神经网络,多GPU计算,多级方法,di =构成方程,科学的机器学习背景科学研究依赖于我们模拟科学现象的能力。从了解生物系统如何与建模宇宙的演变相互作用,模拟使我们能够预测特性,检验假设和探索可能是di = icult的场景,可以通过实验进行研究。我们今天对研究的许多物理系统表现出强烈的多尺度现象。这些系统的特征是它们在多个空间和时间尺度上的复杂相互作用,例如,在全球气候模型中云与大气循环的相互作用,或形成层次暗物质结构。准确地进行多尺度模拟会带来一个重要的挑战,因为它需要可以正确捕获这些相互作用的复杂模型。此外,传统数值模拟的计算成本(例如有限的di =和有限元建模)可能是巨大的,需要为每个仿真使用超级计算机。近年来,科学机器学习的领域已经解决了克服这些挑战的新方法[1]。例如,物理信息的神经网络(PINN)[2,3]是一种使用神经网络进行模拟的方法。与传统的数值方法相比,它们不需要复杂的模拟网格,并且可以轻松地合并观察数据以了解相互作用。但是,使用PINNS开箱即用的是显着的挑战。它们在训练上可能是计算上昂贵的,并且可能难以建模多尺度的互动。我们最近的工作[4,5]表明,Pinns可以通过将它们与域分解和多级建模相结合,从而进行多尺度模拟E =。域分解允许将全局仿真问题分解为较小,易于解决的问题,而多级建模则可以在多尺度交互之间提供更好的通信。

一种用于人类的通用非侵入性神经运动接口......
自计算机出现以来,人类一直在寻求富有表现力、直观且通用的计算机输入技术。虽然已经开发了多种模式,包括键盘、鼠标和触摸屏,但它们需要与中间设备进行交互,这可能会受到限制,尤其是在移动场景中。基于手势的系统利用摄像头或惯性传感器来避免使用中间设备,但它们往往只在不被遮挡或明显的动作中表现良好。几十年来,人们一直在设想脑机接口 (BCI),通过允许仅通过思维向计算机输入来解决接口问题。然而,高带宽通信仅使用为单个个体设计的解码器的侵入式 BCI 进行了演示,因此无法扩展到普通大众。相比之下,肌肉中的神经运动信号可以访问细微的手势和力量信息。在这里,我们描述了一种非侵入式神经运动接口的开发,该接口允许使用表面肌电图 (sEMG) 进行计算机输入。我们开发了一个高度灵敏且强大的硬件平台,该平台易于佩戴/脱下,可感知手腕上的肌电活动并将有意的神经运动命令转换为计算机输入。我们将此设备与一个经过优化的基础设施配对,该基础设施可从数千名同意的参与者那里收集训练数据,这使我们能够开发通用的 sEMG 神经网络解码模型,该模型适用于许多人,而无需对每个人进行校准。未包括在训练集中的测试用户在连续导航任务中以每秒 0.5 次目标获取、在离散手势任务中以每秒 0.9 次手势检测和每分钟 17.0 个调整字的速度展示手势解码的闭环中值性能。我们证明,通过为个人个性化 sEMG 解码模型,输入带宽可以进一步提高 30%,预计未来人类和机器将共同适应,提供无缝翻译人类意图的功能。据我们所知,这是第一个直接利用生物信号的高带宽神经运动接口,具有跨人群的高性能开箱即用泛化功能。

一种用于人类的通用非侵入性神经运动接口......
自计算机出现以来,人类一直在寻求富有表现力、直观且通用的计算机输入技术。虽然已经开发了多种模式,包括键盘、鼠标和触摸屏,但它们需要与中间设备进行交互,这可能会受到限制,尤其是在移动场景中。基于手势的系统利用摄像头或惯性传感器来避免使用中间设备,但它们往往只在不被遮挡或明显的动作中表现良好。几十年来,人们一直在设想脑机接口 (BCI),通过允许仅通过思维向计算机输入来解决接口问题。然而,高带宽通信仅使用为单个个体设计的解码器的侵入式 BCI 进行了演示,因此无法扩展到普通大众。相比之下,肌肉中的神经运动信号可以访问细微的手势和力量信息。在这里,我们描述了一种非侵入式神经运动接口的开发,该接口允许使用表面肌电图 (sEMG) 进行计算机输入。我们开发了一个高度灵敏且强大的硬件平台,该平台易于佩戴/脱下,可感知手腕上的肌电活动并将有意的神经运动命令转换为计算机输入。我们将此设备与一个经过优化的基础设施配对,该基础设施可从数千名同意的参与者那里收集训练数据,这使我们能够开发通用的 sEMG 神经网络解码模型,该模型适用于许多人,而无需对每个人进行校准。未包括在训练集中的测试用户在连续导航任务中以每秒 0.5 次目标获取、在离散手势任务中以每秒 0.9 次手势检测和每分钟 17.0 个调整字的速度展示手势解码的闭环中值性能。我们证明,通过为个人个性化 sEMG 解码模型,输入带宽可以进一步提高 30%,预计未来人类和机器将共同适应,提供无缝翻译人类意图的功能。据我们所知,这是第一个直接利用生物信号的高带宽神经运动接口,具有跨人群的高性能开箱即用泛化功能。