XiaoMi-AI文件搜索系统
World File Search System徒步

展览 R 风景和美学价值
设施的视觉影响主要与太阳能电池板、地上龙骨的视野有关,在较小程度上(由于与较高的设施基础设施共置或分散)与其它设施(如通道、变电站、电池储能系统、围栏和大门以及临时施工区)的视野有关。分析区域内的风景区在视觉影响分析中表示为关键观察点 (KOP)(图 R-2 和 R-3);这些点在下文中如有说明。KOP 是根据设施可能被普通观察者看到和注意到的位置确定的。“普通观察者”被视为未主动寻找或搜索设施,但在可能看到设施的位置从事活动的观察者,例如徒步或沿着风景道路驾车。如果设施基础设施对普通观察者来说不明显,则视觉影响可视为轻微或可忽略不计。

22-556 NS 诉堪萨斯城警察局 (2023 年 6 月 30 日)
根据诉讼阶段所需的证据,本案中的证据讲述了一个令人不安的故事。Ryan Stokes 是一名手无寸铁的黑人,正准备向警方自首,但 Thompson 警官在未经警告的情况下从背后开枪将其击毙。Stokes 仅涉嫌手机盗窃,没有关于他有暴力或威胁行为的报道,在短暂的徒步追逐后,手无寸铁的 Stokes 平静地向另一名警官投降。这名逮捕他的警官 Straub 警官已经将枪收进枪套,因为他知道 Stokes 不会构成威胁。事实上,Stokes 正面对 Straub 并举起双手自首。因此,当 Stokes 毫无预警地被 Thompson 从背后开枪打死时,Straub 感到“震惊”。App. in No. 20-1526 (CA8),第 2058 页。
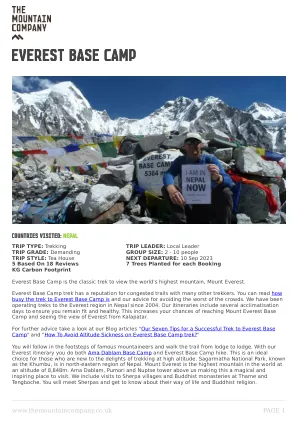
珠穆朗玛峰大本营 | 山地公司
我们在南池住了两晚,以便适应海拔高度,因为我们现在的海拔超过 3,000 米。为了帮助您的身体适应高海拔,我们遵循“爬高,睡低”的黄金法则进行散步。我们有几种从南池出发的一日游选择。第一种选择是长途步行到 3,800 米的 Thame 村,然后返回南池,需要 7 到 8 个小时。如果您喜欢短途步行,您可以参观海拔 3,800 米的 Everest View 酒店。这大约需要 4 个小时,您还可以参观 Khumjung 村。您应该听从身体的召唤,不要在步行时用力过猛。在高海拔地区有时间休息是适应过程的重要组成部分。我们有足够的导游,因此,如果需要,我们可以为团队的不同成员组织这两次徒步。
机场总监 - ADK Executive Search
坦普尔拥有 58 个开发公园和特殊用途设施,包括运动场、野餐亭、马蹄铁和洗衣坑、戏水池、游乐场、狗公园、滑板公园、社区花园、室外露天剧场和超过 18 英里的步道。高尔夫球手可以享受多个球场,包括 Sammons Golf Links 和 Wildflower Country Club,以及 Lions Park 和 South Temple Park 提供的飞盘高尔夫球场。坦普尔提供丰富的水上运动和娱乐活动,包括三个戏水池、三个室外游泳池、一个提供全年游泳、健身和治疗课程的室内温水游泳池,以及多个健身和活动中心和一个水上乐园。贝尔顿湖位于坦普尔以西,是露营、野餐、钓鱼、划船、游泳和徒步旅行的好地方。


基于机器的驾驶决策策略(DDS)...
1,2,3 CSE部,CMR技术校园,印度Telangana 4 4,CMR技术校园CSE助理教授,印度Telangana,印度Telangana,摘要:正在进行的独立车辆的驾驶方法,而不是完全由外部变量(徒步,街头条件的人,等等)无视车辆内部的状况。 本研究提出了“根据自动驾驶汽车的ML驾驶决策策略(DDS)”,它考虑了外部和内部车辆组件(可消耗环境,RPM水平等),以决定独立车辆的最佳方法。 DDS通过使用车辆的云挡管传感器信息来决定独立车辆的最佳驾驶技术。 为了确保DDS的准确性,本文针对MLP和RF神经网络模型进行了测试。 DDS在测试过程中确定了RPM,速度,控制点和路径的变化比MLP高40%,比RF高22%。 此外,其事故率比当前车辆入口低约5%。 关键字 - 自动驾驶汽车,机器学习和驾驶策略。1,2,3 CSE部,CMR技术校园,印度Telangana 4 4,CMR技术校园CSE助理教授,印度Telangana,印度Telangana,摘要:正在进行的独立车辆的驾驶方法,而不是完全由外部变量(徒步,街头条件的人,等等)无视车辆内部的状况。本研究提出了“根据自动驾驶汽车的ML驾驶决策策略(DDS)”,它考虑了外部和内部车辆组件(可消耗环境,RPM水平等),以决定独立车辆的最佳方法。DDS通过使用车辆的云挡管传感器信息来决定独立车辆的最佳驾驶技术。为了确保DDS的准确性,本文针对MLP和RF神经网络模型进行了测试。DDS在测试过程中确定了RPM,速度,控制点和路径的变化比MLP高40%,比RF高22%。此外,其事故率比当前车辆入口低约5%。关键字 - 自动驾驶汽车,机器学习和驾驶策略。
2024-道路-国会-Rego-手册_.pdf
玛格丽特河位于西澳大利亚西南角,是一座迷人的小镇,距离珀斯以南约 277 公里。玛格丽特河拥有约 8,000 名居民,是玛格丽特河地区的中心,以其非凡的自然美景和充满活力的当地文化而闻名。该镇的独特之处在于它结合了世界著名的酿酒厂、原始海滩和古老的森林。游客可以享受一系列活动,包括在屡获殊荣的葡萄园品尝葡萄酒、在传奇的海浪上冲浪以及探索壮观的石灰岩洞穴,如珠宝洞和湖洞。周边地区还提供风景优美的丛林徒步小径,例如卢因-纳多鲁特国家公园的小径,以及展示手工艺品和新鲜农产品的热闹当地市场。玛格丽特河融合了户外探险、文化丰富性和美食体验,使其成为寻求放松和刺激的游客的迷人目的地。
俄勒冈海岸步道行动计划
Ann Hanus,俄勒冈县协会 Bonnie Henderson,旅游指南作家,徒步旅行者 Claire Fiegener,土地保护与开发部 Connie Soper,旅游指南作家 Daniel Davis,土地管理局 Daniela Pavoni,Siuslaw 国家森林 Dawn Harris,美国鱼类与野生动物管理局 Derek Windham,北本德市 Frank Burris,俄勒冈州立大学推广服务处 Jenna Berman,俄勒冈州交通部,第 2 区 Jonah Dart-McLean,阿斯托里亚市公园与娱乐部 Jon-Paul Bowles,目的地管理顾问和 Salmonberry Trail Karmen Fore,前波特兰州立大学俄勒冈解决方案公司 Keith Tymchuk,里德斯波特市 Marcus Hinz,俄勒冈海岸游客协会 Rocky Houston,前道格拉斯县 Todd Martin,Coquille 印第安部落 Trevor Robinson,Siuslaw 国家森林
史蒂文斯,安德鲁 J.
工作经历 / 军事任务经历 德克萨斯农工大学军事科学教授 - 德克萨斯州科珀斯克里斯蒂,现任第 4 安全部队援助旅连长,科罗拉多州卡森堡,2021-2024 年 旅执行官,第 2 斯瑞克旅战斗队,第 4 步兵师,科罗拉多州卡森堡,2020-2021 年 营执行官,第 2 斯瑞克旅战斗队,第 4 步兵师,科罗拉多州卡森堡,2019-2020 年 陆军秘书处委员会记录员,人力资源司令部,肯塔基州诺克斯堡,2015-2017 年 徒步侦察指挥官,第 2 空降旅战斗队、第 82 空降师,布拉格堡,北卡罗来纳州,2013-2015 支援军官,第 82 空降师第 2 空降旅战斗队 1-73 中队,北卡罗来纳州布拉格堡,2012-2013 连执行官,第 101 空降师第 3 旅战斗队 1-187 步兵营 Bravo 连,肯塔基州坎贝尔堡,2010-2011 排长,第 101 空降师第 3 旅战斗队 1-187 步兵营 Bravo 连,肯塔基州坎贝尔堡,2008-2010
分布式防御:一体化防空反导新作战概念
A2/AD 反介入/区域拒止 AMD 防空反导 AMRAAM 先进中程空对空导弹 ARCIC 陆军能力整合中心 ATACMS 陆军战术导弹系统 BMDS 弹道导弹防御系统 C2 指挥与控制 C2BMC 指挥与控制、战斗管理和通信 CEC 协同作战能力 DOTMLPF 条令、组织、培训、物资、领导与教育、人员和设施 DPICC 徒步爱国者信息协调中心 ECS 交战控制站 ELES 增强型发射电子系统 ENBAD 增程非弹道防空 ESSM 改进型海麻雀导弹 FCS 未来作战系统 GBI 地基拦截器 GEM 制导增强导弹 GMD 地基中段防御 HAWK 全程制导杀手 HIMARS 高机动火炮火箭系统 IAMD 综合防空反导 IBCS 综合防空反导作战指挥系统ICBM 洲际弹道导弹 ICC 信息协调中心 IFPC 间接火力防护能力