XiaoMi-AI文件搜索系统
World File Search System执行器

传感器和执行器:B.化学
场效应晶体管 (FET) 传感器是一种极具吸引力的电位法 (生物) 化学测量设备,因为它们具有快速响应、低输出阻抗以及在标准集成电路制造技术中实现微型化的潜力。然而,这些传感器在实际应用中的广泛采用仍然有限,主要是因为时间漂移和交叉敏感性会在测量中引入相当大的误差。在本文中,我们证明,可以通过联合使用一系列 FET 传感器(针对目标和主要干扰离子进行选择)和机器学习 (ML) 方法来纠正这种非理想情况,以便连续和在现场准确预测离子浓度。我们研究了线性回归 (LR)、支持向量回归 (SVR) 和最先进的深度神经网络 (DNN) 在实际水质评估条件下连续 90 天内收集的组合 H +、Na + 和 K + 离子敏感 FET (ISFET) 读数序列监测 pH 时的预测性能。所提出的 ML 算法是根据从商用 pH 传感器获得的参考在线测量值进行训练的。结果表明,DNN 能够提供超过一周的精确 pH 值监测,与标准的两点传感器校准方法相比,相对均方根误差降低了 73%。

阀门和执行器 - 概览手册
高品质组件对于管道系统的可靠和高效运行至关重要。因此,GF 管路系统的球阀始终是理想的解决方案。无论是在化学工艺行业、微电子行业还是水处理行业,GF 管路系统都凭借其广泛的产品系列可靠地覆盖了各种应用。从简单的手动截止阀到全自动球阀 - 我们所有的解决方案都具有真正的价值,并且满足最高的性能和质量要求,毫不妥协。
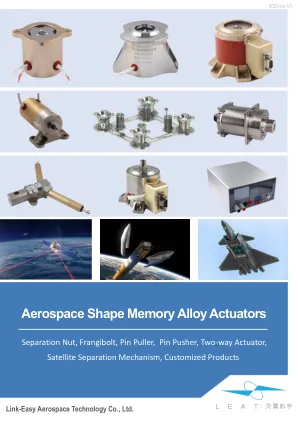
航空航天形状记忆合金执行器
Link-easy Aerospace 的 SBN 系列分离螺母是一种非常简单有效的压紧和释放机构,由镍钛诺形状记忆合金 (SMA) 丝驱动。分离螺母既具有高负载能力(1~20KN),又具有快速驱动时间(~50ms)。我们的分离螺母使用带有冗余 SMA 丝的分段螺母作为触发器。SMA 触发器可实现快速响应,并且释放冲击很小。设备中内置冗余开关,当分离螺母释放或装备时发出“开”或“关”信号,从而简化地面操作和飞行任务要求。分离螺母集成了旋转机构,使其能够在安装外壳内旋转高达 ± 2 °,从而保证较大的角度错位公差。分离螺母配备两个机械接口:标准顶部安装 (SBN-STD) 和底部安装 (SBN-BM)。

高档名优绿茶柔性采摘指研制 - 金小俊
传感器与微系统 第 44 卷 殊形状的刀片完成剪切,采摘成功率达 97 . 36 % 。进一步 设计了一种提拉断梗的机械手,舵机带动主动手指和从动 手指转动,将茶梗折弯并拉断,采摘成功率为 74 . 3 % 。华 中农业大学 [ 6 ] 设计了一种结构为曲柄滑块剪切机构的末 端执行器,通过刀片闭合将鲜叶掐断,利用真空装置将剪切 后的茶叶吸入容纳箱。四川农业大学 [ 7 ] 设计了一种可夹 提式采摘茶叶嫩梢的末端执行器,通过预设夹持力使夹持 件夹断嫩梢叶柄,对一芽一叶和一芽两叶都达到较高的采 摘率。纵观现有大宗茶采摘末端执行器的结构和特点,多 以刀片切割的方式作为采摘原理,无法保证芽叶的完整,这 将在很大程度上降低茶叶的品质,不能用于高档名优绿茶 采摘。南京林业大学 [ 8~12 ] 基于机器视觉、颜色特征、并联 机器人等技术,研发了对新梢有选择性采摘的机器人,研制 了一种气动采摘指,设置固定阈值,确定采摘指夹持嫩芽时 的闭合间隙,通过提拉动作完成采摘,成功率达到 90 % 。 由于自然生长的新梢枝条粗细不一,夹持时的夹持力波动 较大,会存在打滑或夹断现象。 针对现有采茶末端执行器导致嫩芽完整性的不足,本 文设计了一种柔性可感知的仿生采摘指作为采茶机器人的 末端执行器,模仿人工“提手采”的动作,通过固定和提拉 动作实现嫩芽采摘,并增加夹持力测量电路,在夹持过程中 检测夹持力,提高采摘成功率。

用于人类和环境的传感器和执行器
在动荡时期,能够在坚实的基础上再接再厉比以往任何时候都更加重要。为此,我们成立了电路设计研究小组,为我们的专业技能组合增加了一个新的支柱。该团队由博士生和具有行业背景的资深设计师组成,能够出色地开发创新的、面向市场的解决方案。这更有理由让我们期待与弗劳恩霍夫 IIS 和弗劳恩霍夫 AISEC 的同事在新成立的巴伐利亚芯片设计中心 BCDC 合作:在创建这个联合研发平台时,我们希望汇集我们的专业知识,以便能够让公司更轻松地获得芯片设计及其供应链 - 这对巴伐利亚经济的竞争力是一个强大的刺激!在欧洲层面,《欧洲芯片法》等举措强调了这一主题的关键战略作用。这一系列措施是减少欧洲对外部供应的依赖和保持技术独立的重要一步。

无人机数字式执行器自动测试系统设计...
杨涛 * ,柴立人,王刚 中国航天空气动力研究院,北京 100074 * 通讯作者 摘要:针对无人机数字作动器测试问题,该作动器是无人机的关键部件之一,其静动态性能直接影响无人机的机动性能,本文研究了一种全自动数字作动器测试系统,介绍了该系统的硬件和软件设计方案,并进行了应用演示。该系统以 TI 双核微控制器 TMS28377D 为核心,拥有 RS422、RS485、RS232、CAN Bus 等广泛应用于数字作动器的丰富通信接口。此外,测试系统还连接旋转增量式编码器,提供数字作动器的实际位置信息,以及 SD 卡用于实时记录数据。测试系统通过以太网通信与上位机通信,上位机发送命令并接收反馈。本文设计的全自动数字作动器具有可靠性高、升级方便等优点。该自动测试系统在无人机数字执行器的研制、生产和仓储中有着巨大的潜力。

执行器位置传感器新品 - Smc.eu
存在一些位置和表面(脚架的底面等)由于气缸、执行器安装或安装支架的物理干扰,无法安装执行器位置传感器。经过彻底检查后,选择适当的执行器位置传感器位置,使执行器位置传感器不会干扰气缸、执行器安装支架(耳轴或加强环)或配件。执行器位置传感器可能会突出气缸,并且根据气缸孔径或行程,可能无法安装。当需要在气缸的整个行程上测量位置时,请使用行程比传感器范围短 5 毫米的气缸。当执行器位置传感器无法检测到整个行程时,请使用行程读数气缸。
执行器位置传感器 新品 - Smc.eu
由于气缸、执行器安装件或安装支架的物理干扰,有些位置和表面(脚架底面等)无法安装执行器位置传感器。在彻底检查后,选择适当的执行器位置传感器位置,使执行器位置传感器不会干扰气缸、执行器安装支架(耳轴或加强环)或配件。执行器位置传感器可能会突出于气缸,并且根据气缸孔径或行程,可能无法安装。当需要在气缸的整个行程上测量位置时,请使用行程比传感器范围短 5 mm 的气缸。当执行器位置传感器无法检测到整个行程时,请使用行程读数气缸。
掌握智能传感器和执行器的人工智能
入学要求 • 成功完成机电一体化或密切相关领域的学士学位 • 学习结束时必须达到 A2 语言水平,通过 DIT 的德语课程 A2 / 第 3+4 部分或获得 DIT 认可的证书即可。 • 如果您的本科学位是在《里斯本公约》非成员国完成的,建议提交 GATE 或 GRE(普通)证书,以进一步证明您有资格参加此学习计划。 • 需要进行能力评估
研究应用机电执行器部署...
Escola Superior d'Enginyeries Industrial, Aeroespacial i Audiovideo de Terrassa Polytechnic University of Catalonia C/ Colom, 1-11 // 08222 Terrassa, Spain