XiaoMi-AI文件搜索系统
World File Search System扩散器

验证生物反应器中生成的死区为...
摘要可再生能源生产的微生物的活性和生长仍受生物反应器中产生的死区的影响。与同一生物反应器的其他地区相比,这些区域形成了营养和热梯度,在某些地区引起了丰富的食物。当前的研究是识别那些死区的一步,然后是改善反应堆内介质流动的另一步骤。结果表明,生物反应器的内部可能是这种死区创造和扩散的关键因素。例如,圆盘型扩散器的位置有助于在反应堆底部生成这些区域。是使用当前研究中提出的环形型扩散器从反应器中的流体运动推断出来的。在两个生物反应器中都检查了最重要的因素的气泡尺寸,气体质量通量和圆角的辐射。结果表明,当圆盘扩散器被环形扩散器取代时,反应器该区域的这些参数有明显的改善。例如,以0.0198 m/s的速度记录了平均液体速度,而在两个反应堆中使用的相同气泡直径下,以0.00077 m/s的速度记录了速度,以0.00077 m/s的速度记录。在当前研究中还解决了数学模型中MI Croornisms存在的影响。结果表明,在环形扩散器存在下,生物消耗后仍位于反应器底部的氧气量高于常规反应器中的氧气。这清楚地强调了生物反应器内部部位设计的重要性。
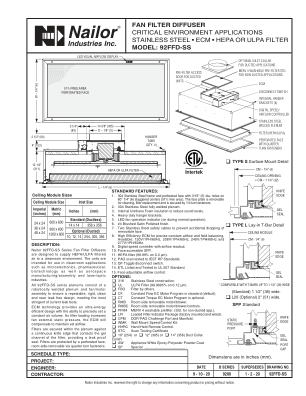
提交,型号 92FFD-SS,风扇过滤器扩散器 - 关键环境应用 - 不锈钢 - ECM - HEPA 或 ULPA 过滤器
描述:Nailor 92FFD-SS 系列风扇过滤器扩散器旨在为洁净室环境提供 HEPA/ULPA 过滤空气。该装置适用于洁净室应用,例如微电子、制药、生物技术以及航空航天制造/装配和激光/光学行业。所有 92FFD-SS 系列集气室均由机器人焊接的集气室和风扇/电机组件组成,以确保可重复、坚固、清洁且几乎无泄漏的设计,满足目前最严格的泄漏测试。ECM 技术提供超节能设计,能够精确设置恒定的风量。当过滤器负载增加风扇外部静压时,ECM 将进行补偿以保持设定的气流。过滤器固定在集气室内,靠在与过滤器凝胶通道接触的连续刀刃上,提供防漏密封。过滤器由穿孔面保护,可通过四分之一旋转紧固件从房间侧面拆卸。
提交,型号92FFD,风扇滤波器扩散器 - 关键环境应用-Aluminum -ECM- HEPA或ULPA滤波器
描述:Nailor 92FFD系列风扇滤光器扩散器旨在为洁净室环境提供HEPA/ULPA过滤空气。这些单元旨在用于洁净室应用,例如微电子,制药,生物技术以及航空航天制造/组装和激光/光学工业。所有92FFD系列全体会议由机器人焊接的元素和风扇/电机组件组成,以确保可重复,刚性,清洁和近乎泄漏的设计,并符合当前最严格的泄漏测试。ECM技术提供了超能量的高效设计,具有精确设置恒定空气量的能力。随着滤波器加载会增加风扇外部静压,ECM将补偿以保持设定的气流。过滤器被固定在全体会议中,以接触过滤器的凝胶通道的连续刀边缘,从而提供防泄漏密封。过滤器受四分之一固定器的穿孔脸部可移动的脸部保护。
对此文档的评论、建议或问题应...
喷嘴。基本喷嘴(由 National Foam System, Inc., Lionville, Pennsylvania 或同等公司制造)应进行修改,将泡沫桶的长度从 2½ 英寸缩短到 1¼ 英寸,并在出口处添加“翼尖”扩散器。扩散器应具有 ⅛ 英寸宽的圆形孔口,1⅞ 英寸长。(可通过稍微压缩 Bernz-o-matic TX-1527 或同等火焰扩散器来制造。)可从海军研究实验室(代码 6180,华盛顿特区 20375)获取喷嘴结构的图纸。在泡沫样品采集期间,喷嘴入口压力应保持在 100 磅/平方英寸 (lb/in²) 的表压下,溶液温度应保持在 23 °C ±5.0 °C。喷嘴应保持在臀部高度,并从 4 至 6 英尺的距离指向篮板。方法和程序应符合 NFPA 412。起泡性应在 6% 的 6 型浓缩液淡水和海水溶液以及 3% 的 3 型浓缩液淡水和海水溶液上运行。

双手机器人操纵的3D策略扩散
图1:BI3D扩散器演员的概述。顶部:BI3D扩散器Actor是一个条件扩散模型,生成两个端效应器的3D轨迹。类似于[13],在每个扩散步骤I中,我们的模型将机器人未来最终效应器轨迹的噪声估计值,提出RGB-D视图O和本体感受信息c。这些令牌是通过注意,使用3D相对位置信息的上下文对语言进行的,并参与语言令牌l以融合教学信息。Our model predicts the noise of left- and right-hand 3D locations ( ϵ loc θ,l ( o , l, c l , τ i l , i ) and ϵ loc θ,r ( o , l, c r , τ i r , i ) ) and the noise of left- and right-hand 3D rotations ( ϵ rot θ,l ( o , l, c l , τ i l , i ) and ϵ rot θ,r ( o , l, c r , τi,r i)。底部:在推断期间,BI3D扩散器演员迭代地将未来双手轨迹的估计值降低。


与3D场景表示形式的策略扩散
摘要:扩散策略是有条件的扩散模型,这些模型学习以机器人和环境状态为条件的机器人动作分布。他们最近显示出胜过确定性和替代作用分布学习公式的表现。3D机器人策略使用3D场景特征表示形式使用感应深度从单个或多个相机视图汇总。他们已经显示出比在相机观点之间更好地概括其2D对应物。我们统一了这两条工作和现在的3D扩散器演员,这是一种具有新颖的3D DeNoising Transformer的神经政策,它融合了来自3D视觉场景的信息,语言指令和本体感受,以预测NOISISE 3D ROBOT姿势的噪声。3D扩散器Actor在RLBench上设置了新的最先进的,其绝对性能增益比当前的SOTA在多视图设置上占据了18.1%,并且在单视图设置上的绝对增益为13.1%。在加尔文基准测试上,它比当前的SOTA相对增加了9%。它还学会了通过少数示威来控制现实世界中的机器人操纵器。通过与当前的SOTA策略和模型的消融进行彻底比较,我们显示了3D扩散器演员的设计选择极大地超过了2D表示,回归和分类目标,绝对关注和整体非言语的非言语非言语的3D场景嵌入。

1 2 3 4 MD-82 商用客机头等舱的精确高分辨率边界条件和流场 6 7 刘伟 1 , 温继洲 1 , 赵江月 1 , 尹伟友 1 , 沈晨 1 , 赖代一 1 , 林朝欣 8 2 , 刘俊杰 1 , 孙河江 1,* 陈庆艳 1,3 9 10 1 天津大学环境科学与工程学院,天津 300072,11 中国 12 2 波音民用飞机环境控制系统,华盛顿州埃弗里特 98203,美国 13 3 普渡大学机械工程学院,印第安纳州西拉斐特 47907,美国 14 15 * 电子邮件地址:sunhe@tju.edu.cn 16 17 摘要 18 19商用客机客舱对于创造热舒适和健康的客舱环境至关重要。除了客舱几何形状和家具外,流场还取决于扩散器处的热流体边界条件。为了研究客舱内的流场,本文介绍了一种获取客舱几何形状、扩散器边界条件和流场的程序。本研究使用激光跟踪系统和逆向工程生成了 MD-82 飞机客舱的数字模型。尽管该系统的测量误差很小,但仍然需要近似和假设以减少工作量和数据量。几何模型还可用于轻松计算空间体积。采用热球风速计 (HSA) 和超声波风速计 (UA) 组合来获取扩散器处的速度大小、速度方向和湍流强度。测量结果表明,实际客舱内的流动边界条件相当复杂,速度大小、速度方向和湍流强度在不同缝隙开口之间差异很大。还使用 UA 测量 20 Hz 下的三维空气速度,这也可用于确定湍流强度。由于流动的不稳定性,应至少测量 4 分钟才能获得准确的平均速度和湍流信息。结果发现,流场速度低、湍流强度高。这项研究为验证计算流体力学 (CFD) 模型提供了高质量数据,包括客舱几何形状、扩散器边界条件和 MD-82 商用客机头等舱的高分辨率流场。 关键词:客机客舱;客舱几何形状;流场;实验;扩散器 41 42 1. 简介 43 44 商用客机客舱中的空气分布用于保持乘客和机组人员的热舒适度和空气质量。这些空气分布可以控制空气温度和 46 空气速度场,并可以稀释气体和颗粒浓度。尽管航空航天工业在过去几十年中已经改善了飞机客舱的热舒适度和卫生状况(Space 等,2000 年),空气分配系统需要进一步改进。49
1 2 3 4 MD-82 商用客机头等舱的精确高分辨率边界条件和流场 6 7 刘伟 1 , 温继洲 1 , 赵江月 1 , 尹伟友 1 , 沈晨 1 , 赖代一 1 , 林朝欣 8 2 , 刘俊杰 1 , 孙河江 1,* 陈庆艳 1,3 9 10 1 天津大学环境科学与工程学院,天津 300072,11 中国 12 2 波音民用飞机环境控制系统,华盛顿州埃弗里特 98203,美国 13 3 普渡大学机械工程学院,印第安纳州西拉斐特 47907,美国 14 15 * 电子邮件地址:sunhe@tju.edu.cn 16 17 摘要 18 19商用客机客舱对于创造热舒适和健康的客舱环境至关重要。除了客舱几何形状和家具外,流场还取决于扩散器处的热流体边界条件。为了研究客舱内的流场,本文介绍了一种获取客舱几何形状、扩散器边界条件和流场的程序。本研究使用激光跟踪系统和逆向工程生成了 MD-82 飞机客舱的数字模型。尽管该系统的测量误差很小,但仍然需要近似和假设以减少工作量和数据量。几何模型还可用于轻松计算空间体积。采用热球风速计 (HSA) 和超声波风速计 (UA) 组合来获取扩散器处的速度大小、速度方向和湍流强度。测量结果表明,实际客舱内的流动边界条件相当复杂,速度大小、速度方向和湍流强度在不同缝隙开口之间差异很大。还使用 UA 测量 20 Hz 下的三维空气速度,这也可用于确定湍流强度。由于流动的不稳定性,应至少测量 4 分钟才能获得准确的平均速度和湍流信息。结果发现,流场速度低、湍流强度高。这项研究为验证计算流体力学 (CFD) 模型提供了高质量数据,包括客舱几何形状、扩散器边界条件和 MD-82 商用客机头等舱的高分辨率流场。 关键词:客机客舱;客舱几何形状;流场;实验;扩散器 41 42 1. 引言 43 44 商用客机客舱中的空气分布用于维持乘客和机组人员的热舒适度 45 和空气质量。这些空气分布可以控制空气温度和 46 空气速度场,并可以稀释气体和颗粒浓度。尽管 47 航空航天工业在过去 48 十年中已经改善了飞机客舱的热舒适度和卫生状况(Space et al.,2000),空气分配系统需要进一步改进。49

LOTTE CHEMICAL CORP. 先进材料
SAN)、工程塑料(PC、PC合金、PBT、mPPE、PA、PPA、PPS、PCT)、热塑性塑料(PE、PP、PP/GF、TPV、TPS、WLFT)、亚克力实体面材、人造石(天然石英)、LD(光扩散器)

开路风力发电机的设计、构造和分析
图 1. 完整的风洞组件 ...................................................................................................... 2 图 2. 位于收缩锥前方的蜂窝结构 ...................................................................................... 5 图 3. 拆解的风洞组件:(1)收缩锥,(2)测试/工作部分,和(3)扩散器 ............................................................................................................. 5 图 4. 安装风扇并连接到 12 伏电池的驱动部分 ............................................................................. 6 图 5. 收缩锥示意图 ............................................................................................................. 10 图 6. 测试部分内的安装物体 ............................................................................................. 10 图 7. 扩散器示意图 ............................................................................................................. 11 图 8. 数字风速计 ............................................................................................................. 12 图 9. 双输入数字压力计 ............................................................................................. 12 图 10. 用于收集数据的测试部分内的风速计装置 ............................................................................. 12 图11. 12 伏电池和鳄鱼夹用于为风扇供电 ................................................................ 14 图 12. 收缩锥(SolidWorks) ................................................................