XiaoMi-AI文件搜索系统
World File Search System抗干扰

综合控制方案可改善抗干扰能力...
摘要:对于新型无扰动有效载荷(DFP)航天器,由于脐带电缆的存在,低频扰动难以隔离,降低了有效载荷的指向精度和稳定性。本研究设计了一种改进的DFP航天器及其集成控制方案,以提高指向精度和扰动衰减性能。改进的DFP航天器由有效载荷模块(PM)、支撑模块(SM)和测试质量(TM)组成。集成控制系统细分为三个相互连接的控制回路。主动隔振控制回路用于将PM与高频带的扰动隔离,并控制PM跟踪SM的姿态。无拖曳控制回路用于将SM与低频带的扰动隔离,并控制SM跟踪TM的姿态。姿态指向控制回路用于控制TM跟踪期望姿态。基于改进的DFP航天器和综合控制系统,PM上搭载的有效载荷可以在所有频段内隔离干扰,并能实现其高水平的指向精度和稳定性要求。
太空系统司令部演示卫星抗干扰能力
加利福尼亚州埃尔塞贡多 — 太空系统司令部 (SSC) 使用一颗在轨运行卫星成功演示了其地面抗干扰卫星通信 (SATCOM) 能力。此次活动演示了受保护战术企业服务 (PTES) 联合中心与测试终端之间的无线受保护战术波形 (PTW) 连接,以及与陆军空军抗干扰调制解调器项目办公室开发的支持 PTW 的调制解调器的有线连接。PTW 为联合作战人员提供了关键的抗干扰能力。

基于自适应动态逆的抗干扰与耦合纵向自动着舰控制律
摘要:基于非线性动态逆(NDI)设计了纵向自动着舰系统(ACLS)控制律,以实现抑制尾流、解耦横向状态和跟踪动态期望着陆点(DTP)的目的。首先,建立F/A−18飞机六面进近非线性着舰模型,获取气动、操纵面、极限状态等参数。其次,采用俯仰角控制跟踪期望纵向轨迹的策略。基于自适应NDI设计了自动功率补偿系统(APCS)、俯仰角速率、俯仰角和垂直位置控制环路,并详细推导了稳定性分析和原理描述。采用频率响应法设计了甲板运动补偿(DMC)算法。第三,通过遗传算法对控制参数进行优化。提出了一种综合考虑飞机速度、迎角(AOA)、俯仰速率、俯仰角和垂直位置的适应度函数。最后,在半实物仿真平台上进行了综合仿真。结果表明,所采用的自动着陆控制律既能达到良好的性能,又能抑制气流尾流和横侧耦合。

利用卷积干扰消除网络实现人工智能驱动的通用抗干扰解决方案
无线链路越来越多地用于提供关键服务,而故意干扰(干扰)仍然是此类服务的严重威胁。在本文中,我们关注的是通用抗干扰模块的设计和评估,该模块与通信链路的具体情况无关,因此可以与现有技术相结合。我们认为,这样的模块不需要显式探测、探测、训练序列、信道估计,甚至不需要发射机的配合。为了满足这些要求,我们提出了一种依赖于机器学习的进步以及神经加速器和软件定义无线电前景的方法。我们确定并解决了多个挑战,从而产生了卷积神经网络架构和多天线系统模型,以推断干扰的存在、干扰发射的数量及其各自的相位。这些信息被不断输入到消除干扰信号的算法中。我们开发了一个双天线原型系统,并使用软件定义无线电平台在各种环境设置和调制方案中评估我们的干扰消除方法。我们证明,配备我们方法的接收节点可以以超过 99% 的准确率检测干扰器,即使干扰器功率比合法信号高出近两个数量级 (18 dB),也能实现低至 10 − 6 的误码率 (BER),而且无需修改链路调制。在非对抗性环境中,我们的方法还可以具有其他优势,例如检测和缓解冲突。
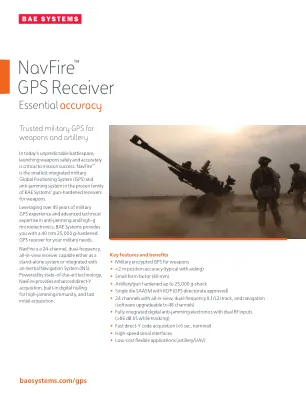
NavFire™ GPS 接收器 - BAE 系统
这款集成接收器提供完整的精确定位服务 (PPS) 精度。同时的 L1/L2 操作提供实时电离层校正,以进一步提高精度。其主要通信接口是高速 LVCMOS 串行端口。集成的抗干扰解决方案利用双元件数字零位来提高抗干扰能力。此外,该系统具有超紧耦合(UTC)单元接口选项,可提高抗干扰性能和导航精度。
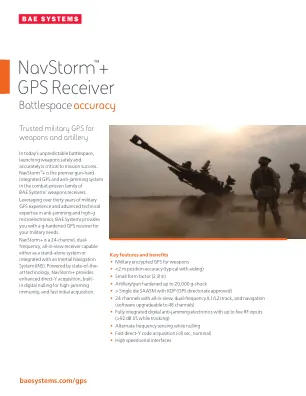
NavStorm™+ GPS 接收器 - BAE 系统
这款集成接收器提供完整的精确定位服务 (PPS) 精度,其同时进行的 L1/L2 操作可提供实时电离层校正,从而进一步提高精度。其主要通信接口是高速 LVCMOS 串行端口。集成的抗干扰解决方案利用数字调零来提高抗干扰能力。此外,该系统还具有超紧耦合 (UTC) 单元接口选项,可提高抗干扰性能和导航精度。

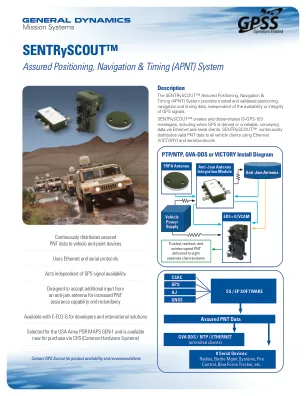
SENTRySCOUT™ - 英国通用动力公司
AJAIM(抗干扰天线集成模块)是一款符合军用标准的双输入四输出抗干扰天线系统 (AJAS) 和固定辐射模式天线 (FRPA) 集成模块。该模块允许在 AJ 和 FRPA 之间切换对保证定位、导航和授时 (APNT) 系统的 RF 输入。AJAIM 还可以根据所连接的 APNT 系统的需求将车辆电池电源切换到 AJAS,从而基于仅使用 FPRA 输入创建低功耗模式。
TRUTRAK™ M-CODE 产品系列 - L3Harris
L3Harris 的 TruNav-M 是一款集成式抗干扰 GPS 接收器 (AJ/GPS),在单个电路卡组件中提供数字抗干扰电子设备和 M2GRAM。TruNav 生成导航解决方案并使用基于 MGUE TRD 的客户端界面提供解决方案。L3Harris 的标准产品托管混合导航软件,能够接收和应用来自外部导航辅助设备的输入,以提高 GPS 性能并在 GPS 丢失后优雅地降级。TruNav 提供后零点 RF 输出以保护额外的 GPS 接收器,并且可以配置为 AJ/GPS(带 M2GRAM)或仅 AJ(不带 M2GRAM)。
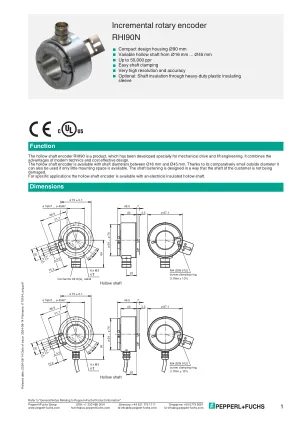
增量式旋转编码器 RHI90N
抗干扰措施 使用高度复杂的微电子器件需要始终实施抗干扰和布线概念。结构越紧凑,对现代机器的性能要求越高,这一点就越重要。以下安装说明和建议适用于“正常工业环境”。对于所有干扰环境,没有理想的解决方案。当采取以下措施时,编码器应处于完美的工作状态:• 在串行线的开始和结束处(例如,控制和最后一个编码器)用 120 电阻器(接收/发送和接收/发送之间)终止串行线。• 编码器的布线应远离可能造成干扰的电源线。