XiaoMi-AI文件搜索系统
World File Search System拉库尔


Jaist存储库
摘要 - 无人驾驶汽车(UAV)对关键应用(例如搜索和救援操作)具有巨大的潜力,在搜索和救援行动中,对室内环境的准确感知至关重要。然而,本地化,3D重建和语义细分的同时融合呈现出一个明显的障碍,尤其是在配备有限的功率和计算资源的UAV背景下。本文提出了一种新的方法,可以解决无人机操作中语义信息提取和利用方面的挑战。我们的系统集成了最先进的视觉大满贯,以估计后端的全面的6多姿势和高级对象分割方法。为了提高框架的计算和存储效率,我们采用了简化的基于体素的3D地图表示 - OctOmap来构建工作系统。此外,融合算法是不合适的,可以从前端大满贯任务和相应点获得每个帧的语义信息。通过利用语义信息,我们的框架增强了无人机在室内空间中感知和导航的能力,从而解决了姿势估计准确性和降低不确定性的挑战。通过凉亭模拟,我们验证了我们提出的系统的功效,并将我们的方法成功地嵌入了用于现实世界应用的Jetson Xavier AGX单元中。索引项 - 语义映射,S3M,无人机,ROS,SLAM。


Jaist存储库
摘要 - 自主在现实世界环境中进行自主导航,搜索和救援操作的特殊性,无人驾驶飞机(UAVS)需要全面的地图以确保安全。但是,普遍的度量图通常缺乏对整体场景理解至关重要的语义信息。在本文中,我们提出了一个系统来构建一个概率度量图,并富含从RGB-D图像中从环境中提取的对象信息。我们的方法结合了前端的最先进的Yolov8对象检测框架和后端的2D SLAM方法 - 制图师。为了有效跟踪从前端接口提取的语义对象类别类别,我们采用了创新的bot-sort方法。引入了一种新颖的关联方法来提取对象的位置,然后用度量图将其投影。与以前的研究不同,我们的方法在具有各种空心底部对象的环境中可靠地导航。我们系统的输出是概率图,它通过合并特定于对象的属性,包括类别的差异,准确定位和对象高度来显着增强地图的表示形式。已经进行了许多实验来评估我们提出的方法。结果表明,机器人可以有效地产生包含多个对象(尤其是椅子和桌子)的增强语义图。此外,在嵌入式计算机-Jetson Xavier AGX单元中评估我们的系统,以在现实世界应用中演示用例。索引项 - 语义映射,无人机,ROS,度量图。

UWL存储库
han,s,yuan,x,Zhao,f,Manyande,Anne Orcid:https://orcid.org/0000-0000-0000-0002-8257-0722,Gao,Go,f,wang,j,j,j,Zhang,w and Zhang,w and tian,x(2024)aletiation aletiation neuropsivation neuropiuntion neuropiuntion neuropiuntion neuropiuntion neuropiuntion neuropiunty 2通过PI3K/AKT途径的小胶质细胞极化和突触可塑性。炎症研究,第73页。157-174。ISSN 1023-3830
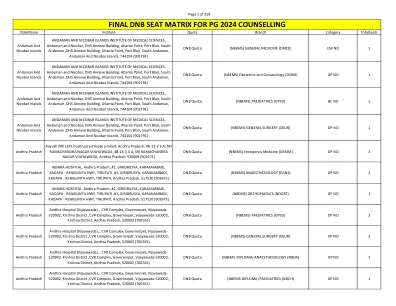
PG 2024 咨询的最终 DNB 席位矩阵
安库拉妇女儿童医院(安库拉蒂鲁帕蒂医院私人有限公司下属机构),安得拉邦,安库拉妇女儿童医院雷尼贡塔路蒂鲁帕蒂,安得拉邦安库拉妇女儿童医院雷尼贡塔路蒂鲁帕蒂,


普拉哈拉达·拉奥简历
目录 第 1 部分 教育和工作经历 4 第 1.1 部分 教育经历 4 第 1.2 部分 工作经历 4 第 2 部分 研究经费 5 第 2.1 部分 外部资助的研究补助金 5 第 2.2 部分 内部资助的研究补助金。 9 第 2.3 部分 (非研究)资金记录 9 第 3 部分 奖学金 10 第 3.1 部分 同行评审期刊出版物 10 第 3.2 部分 正在评审或待修订的同行评审期刊出版物。 22 第 3.3 部分 带有演示文稿的同行评审会议记录 23 第 3.4 部分 专利和披露 29 第 3.5 部分 受邀演讲或主题演讲。 30 第 3.6 节 无论文的会议报告(自 2017 年起) 33 第 3.7 节 书籍和书籍章节 36 第 3.8 节 其他出版物 36 第 3.9 节 国家和国际研究奖项和认可 37 第 3.10 节 地区和地方研究奖项和认可 37 第 3.11 节 受邀专家小组 37 第 4 节 教学、教学法和学生咨询 38 第 4.1 节 教授的课程 38 第 4.2 节 指导至完成学业的博士生 39 第 4.3 节 当前正在攻读的博士生。 40 第 4.4 节 访问学者和博士后 40 第 4.5 节 硕士生(论文选项) 41 第 4.6 节 本科生 42 第 5 节 服务 43 第 5.1 节 期刊编辑或副编辑 43 第 5.2 节 论文评审的期刊 43 第 5.3 节 国际和国家组织的领导职位 43 第 5.4 节 地区和地方组织的领导职位。 44 第 5.5 节 专业组织的成员资格 44 第 5.6 节 研究评审小组 44 第 5.7 节 内部委员会的领导职位。 45 第 5.8 节 其他服务成就 46