机构名称:
¥ 1.0
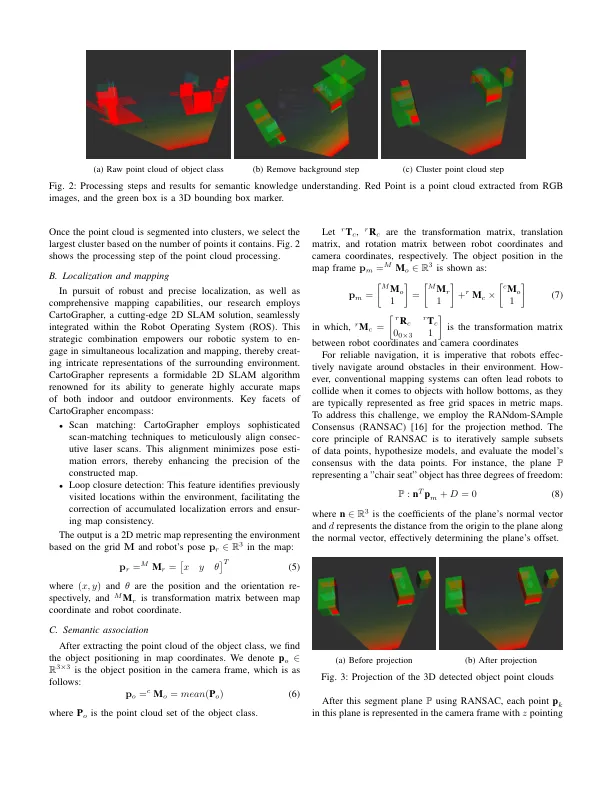
摘要 - 自主在现实世界环境中进行自主导航,搜索和救援操作的特殊性,无人驾驶飞机(UAVS)需要全面的地图以确保安全。但是,普遍的度量图通常缺乏对整体场景理解至关重要的语义信息。在本文中,我们提出了一个系统来构建一个概率度量图,并富含从RGB-D图像中从环境中提取的对象信息。我们的方法结合了前端的最先进的Yolov8对象检测框架和后端的2D SLAM方法 - 制图师。为了有效跟踪从前端接口提取的语义对象类别类别,我们采用了创新的bot-sort方法。引入了一种新颖的关联方法来提取对象的位置,然后用度量图将其投影。与以前的研究不同,我们的方法在具有各种空心底部对象的环境中可靠地导航。我们系统的输出是概率图,它通过合并特定于对象的属性,包括类别的差异,准确定位和对象高度来显着增强地图的表示形式。已经进行了许多实验来评估我们提出的方法。结果表明,机器人可以有效地产生包含多个对象(尤其是椅子和桌子)的增强语义图。此外,在嵌入式计算机-Jetson Xavier AGX单元中评估我们的系统,以在现实世界应用中演示用例。索引项 - 语义映射,无人机,ROS,度量图。
Jaist存储库
主要关键词



相关文件推荐