XiaoMi-AI文件搜索系统
World File Search System拓扑结构

3D形状合成的生成内侧抽象
各种方法开发了3D综合的深度神经网络架构[Chaudhuri等。2020; Patil等。2020; Shi等。2023; Xu等。2023]。尽管这些方法可以捕获各种宏观的外观,但它们很少明确地模型形状的结构或拓扑结构,而是依靠网络的代表力来生成可见的看起来可见的体素电网[Liu等。2017],点云[Achlioptas等。2018a],网格[Dai和Nießner2019]或隐式领域[Chen and Zhang 2019]。与2D图像生成网络相比,由于3D网络被额外维度所带来的其他资源开销所阻碍,因此它们通常很难建模精细的细节和连接性。某些方法模型零件布局[Li等。2017],但在它们可以产生的结构的复杂性上受到限制。同时,这些先前的3D合成方法很少使艺术家灵活,精确地控制。它们更充当非有条件生成的黑匣子,或者通过图像或3D扫描重建。最新方法基于文本提示引入合成[Lin等。2023; Poole等。2023],取得了显着的结果,但仅通过及时工程进行全球控制。3D角色艺术家长期以来一直习惯于摆姿势钻机以进行准确的角色配置。然而,这种直接的局部控制和通过直观的抽象的可解释性在一般3D形状合成中的成功限制。背面有特定板条配置的椅子。没有明确结构建模的方法缺乏指定特定所需拓扑的能力,例如另一方面,进行模型零件级结构的方法仅限于由一些粗制的拓扑定义的简单拓扑结构,并且无法对复杂的FRETWORK或装饰进行建模。我们对现实的3D形状生成感兴趣,该生成能够准确地模拟复杂的拓扑和几何细节,并支持对形状结构和几何形状的更可解释的控制。为实现这一目标,我们基于三个关键见解:(1)拓扑细节通常可以在“骨骼抽象”中捕获,就像内侧轴变换获得的那样[Tagliasacacchi等。2016],即使没有有意义的部分分解,它也可以作为形状的简化结构代理。 (2)这些抽象可以通过生成方法合成[Karras等。2022],由稀疏点云预测[Nie等。2020; Yin等。2018],或由艺术家手动创建,而不必是完美的,因为它们是模仿中间表示; (3)每个抽象可以通过另一个训练有素的模型将每个抽象解码为逼真的表面。我们的方法通过推出并组装了以骨骼抽象为条件的局部支持的神经隐式功能来实现表面生成步骤。我们从该领域的最新工作中汲取了证明,该研究将潜在代码与稀疏集中的每个3D点相关联,并从潜在网格中生成局部隐含[Zhang等。2022]。但是,先前工作中稀疏的点支持集往往是任意的,而不是很容易解释。与单个大隐含物相比,这些不合格的混合物定义了整体合成形状,并可以更好地生成细微的几何细节。基于3D神经场和跨注意的后续工作[Zhang等。2023]完全在潜在网格上滴显式空间接地。相比之下,我们的基于骨架的潜在网格更具结构感知,为3D空间中的潜在代码提供了可解释的支持,同时仍然能够代表复杂的,细粒度的拓扑结构。我们总结了我们的贡献如下:
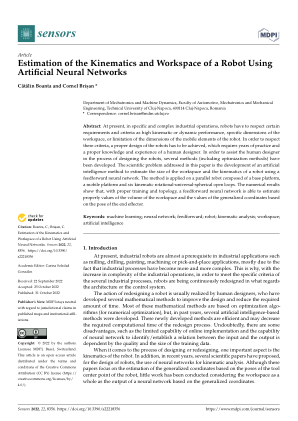
文章使用人工神经网络估计机器人的运动学和工作空间
摘要:目前,在特定而复杂的工业操作中,机器人必须满足某些要求和标准,如高运动学或动态性能、工作空间的特定尺寸或机器人移动元件尺寸的限制。为了满足这些标准,必须对机器人进行适当的设计,这需要多年的实践以及人类设计师的适当知识和经验。为了协助人类设计师进行机器人设计,已经开发了几种方法(包括优化方法)。本文解决的科学问题是开发一种人工智能方法,使用前馈神经网络来估计机器人的工作空间大小和运动学。该方法应用于由基座平台、移动平台和六个运动旋转万向球面开环组成的并联机器人。数值结果表明,通过适当的训练和拓扑结构,前馈神经网络能够根据末端执行器的姿态正确估计工作空间体积值和广义坐标值。
纤维素基材料的计算研究
在部分 (I) 中,我们构建了 Martini 3 粗粒 (CG) 分子动力学 (MD) 模型来描述 CNC 的不同晶体结构(包括 I β /II/III I )。随后,我们研究了 COO − 修饰的 CNC I β 在 NaCl 水溶液中的分散和聚集特性,发现结果与实验观察结果一致。此外,基于为纤维素 I β /II 开发的拓扑结构,我们研究了纤维素晶体的再生过程。X 射线衍射 (XRD) 用于监测再生过程中的结构变化和微晶形成。XRD 结果表明再生纤维素晶体为纤维素 II,与实验测量结果一致。在部分 (II) 中,我们使用我们开发的 TW 模型探索了光在透明木材 (TW) 中的传播,即纤维素/PMMA 复合材料。这些模型是通过在 SEM 图像中识别纤维素纤维结构来构建的。我们采用了射线追踪,一种

无人机惯性在线测量...
动力学模型及其参数的辨识是机器人技术和系统动力学建模领域的基本问题之一。对于物体具有六个自由度 (6-DOF) 的一般情况,例如无人机 (UAV) 的情况,关键物理参数是飞行器质量和转动惯量。尽管无人机质量及其几何/拓扑结构很容易获得,但考虑到惯性张量无法通过静态试验测量,因此很难辨识。本文介绍了一种基于双线摆和机载集成传感器系统的简单有效的刚体惯性在线估计方法。其中,测试对象(即无人机)由两根细平行线悬挂,形成绕垂直轴的双线扭摆。使用无人机飞行控制器 (FC) 单元的机载传感器记录和处理摆锤振动,以获得用于最终惯性估计阶段的无趋势和无噪声信号。针对与无人机控制箱和完整无人机配置相关的两个典型悬浮物体案例,通过实验验证了所提出的识别算法。

考虑抽水蓄能电站参与调峰的辅助服务市场模型
在可再生能源大规模接入电网导致系统运行灵活性不足、调峰压力增大的背景下,本文提出了一种涉及抽水蓄能电站的调峰辅助服务市场模型。首先,以调峰成本最小为优化目标,量化参与调峰机组的调峰价值,建立调峰辅助服务市场数学模型。然后,考虑抽水蓄能电站兼具源荷特性,深度挖掘抽水蓄能电站的调峰价值分担火电机组调峰压力,建立峰值辅助服务费补偿机制。最后,提出11机14节点的系统拓扑结构对本文提出的调峰辅助服务市场模型进行仿真,并验证了所提方法的有效性。

在光子波导中的非su-schrieffer-heeger模型中对称性的破坏和复兴
对称性是现代物理的基石之一,在不同领域具有深远的影响。在受对称保护的拓扑系统中,对称性负责保护表面状态,这是这些材料所表现出的迷人特性的核心。当保护边缘模式的对称性破裂时,拓扑阶段就会变得微不足道。通过工程损失破坏了保护拓扑遗产阶段的对称性,我们表明出现了新的真正的非热对称性对称性,它保护并选择了其中一种边界模式:拓扑单层。此外,非富甲系统的拓扑结构可以以更高维度的有效遗产汉密尔顿人为特征。为了证实该理论,我们使用光子晶格研究了非弱者单和二维SSH模型,并在两种情况下都观察到动态产生的单体。我们根据存在并计算相应拓扑不变的(非热)对称性对系统进行分类。

人脑活动的时空复杂性结构
人脑在大型功能网络中运行。这些网络是整个大脑区域的时间相关活性的表达,但是全球网络属性与单个区域的神经动力学的关系尚不完全理解。在这里,我们表明大脑的网络架构与神经规律性的关键发作密切相关,可见为功能性磁共振成像信号中自发的“复杂性下降”。这些发作密切解释区域之间的功能连通性强度,弥补神经活动模式的传播并反映了年龄和行为的个体差异。此外,复杂性下降定义了神经活动,该神经活动表明,动态地塑造了大脑网络的连通性强度,拓扑结构和层次结构,并全面解释了大脑内已知的结构功能关系。这些发现描述了神经活动的原则复杂性架构 - 一个人类的“复杂组”,基于大脑的功能网络组织。
模拟Sigmoid函数及其近似导数的设计方法
摘要 — 在本文中,我们建议使用模拟电路实现 S 型函数,该函数将用作多层感知器 (MLP) 网络神经元的激活函数,以及其近似导数。文献中已经提出了几种实现方法,特别是 Lu 等人 (2000) 的实现方法,他们提供了采用 1.2 µ m 技术实现的可配置简单电路。在本文中,我们展示了基于 Lu 等人的 S 型函数电路设计,使用 65 nm 技术以降低能耗和电路面积。该设计基于对电路的深入理论分析,并通过电路级模拟进行验证。本文的主要贡献是修改电路的拓扑结构以满足电路所需的非线性响应以及提取所得电路的直流功耗。索引词——激活函数、模拟 CMOS 电路、近似导数、反向传播、多层感知器、S 型函数。
储能型铁路功率调节器分层补偿优化策略
摘要:针对电气化铁路负序治理及再生制动能量利用问题,提出了一种基于铁路功率调节器的考虑储能系统潮流的分层补偿优化策略。介绍了储能式铁路功率调节器的拓扑结构,分析了其负序补偿及再生制动能量利用机理。考虑储能系统设备容量和潮流对铁路功率调节器补偿效果的影响,构建了储能式铁路功率调节器分层补偿优化的目标函数和约束条件,并采用序列二次规划法进行求解。通过多条件仿真试验验证了所提策略的可行性。结果表明,所提出的优化补偿策略在系统设备容量受限的情况下,能够实现负序补偿和再生制动能量利用,提高牵引变电站的功率因数,且具有良好的实时性。
紧凑型轴上光学头深度调频干涉测量中的鬼光束抑制
摘要:我们提出了一种紧凑型光学头设计,用于使用深度频率调制干涉法 (DFMI) 进行宽范围、低噪声位移传感。轴上光束拓扑结构在准单片组件中实现,依靠立方体分束器和通过垂直表面的光束传输来保持角度对准在空气或真空中运行时恒定,这会导致产生鬼光束,从而限制相位读出线性。我们研究了将这些光束耦合到 DFMI 的非线性相位读出方案中,并对相位估计算法进行了调整以减少这种影响。这是通过平衡检测和深度频率调制干涉法中具有不同相对时间延迟的拍频信号的固有正交性的组合来实现的,这是异差、正交或同差干涉法所不具备的独特功能。