XiaoMi-AI文件搜索系统
World File Search System探头

iQ探头
超声波探头(图 1)对于实现出色的成像性能和重复性至关重要。其设计要求开发先进材料,以提高换能器的操作效率并提供出色的图像质量 (IQ) 性能。C 2-9 和 E 3-12 中嵌入的最新技术将先进材料与专门设计的换能器几何形状相结合。声学透镜材料可最大限度地减少混响并提高图像对比度分辨率。Esaote 的创新型背衬块可增加传输到患者体内的超声波能量,同时保持非常宽的带宽(图 2)。这直接转化为增强的图像灵敏度、更高的分辨率、有用的穿透力以及从近场到远场的整体清晰度。自动化和积极的再处理(清洁、消毒和灭菌)趋势要求提高探头的可靠性。为了应对这一趋势,Esaote 开发了一种放置在声学透镜下方的特殊保护层,可有效保护换能器并防止液体进入。凭借这些创新,Esaote 在所有主要模式(无论是基础成像、多普勒还是组织谐波成像)以及整个临床应用范围内的诊断信心和准确性都达到了新的水平。

仪表探头
Feather Touch 探头专为测量汽车挡风玻璃、电视显像管、药瓶、机电元件和塑料零件等精密表面而设计。传统探头施加的尖端力约为 0.7N,而 Feather Touch 在水平位置使用时仅施加 0.18N。通过将自然弹性的传统护罩替换为公差较小的压盖,可以实现这一降低。对于气动版本,通过压盖的空气泄漏被限制在 1 巴时小于 2.5 毫升/秒,以最大限度地降低被测量表面受到污染的可能性。尽管空气流量很小,但探头内的轴承会不断被清洗,避免积聚灰尘(建议使用过滤空气)。可更换的尼龙尖端用于防止表面损坏,但测量热玻璃时,可以安装碳化钨尖端。电缆上的编织钢丝网覆盖层为停机时间至关重要的应用提供了额外的保护。为了获得极低的力,Feather Touch 探头可以不带弹簧。前进和后退运动由气动/真空缩回激活,但调节气压可使所有探头具有相同的尖端力,并在整个测量范围内保持恒定。如果探头垂直安装(尖端朝上),则缩回是由移动部件的自重完成的,无需真空。


一种先进的探头泄漏校准方法...
摘要 —本文介绍了一种用于解决晶圆上测试系统中探针-探针泄漏引起的误差项的先进校准方法。介绍了一种新的 12 项误差模型,用于晶圆上测试系统,包括矢量网络分析仪 (VNA)、频率扩展器(如果有)、电缆/波导、探针、探针接触垫和探针-探针泄漏。开发了一种两步校准过程和一种算法,该算法具有四个片上校准标准,包括一个未定义的直通、两对未定义的对称反射(例如开路-开路和短路-短路对)和一对已知匹配负载。此外,还提出了一种改进的匹配负载电路模型以提高精度。已经在 0.2 GHz 至 110 GHz 频率范围的失配衰减器上测试了该校准方法,并将结果与数值模拟和现有校准方法进行了比较。结果表明,衰减器的 |S 11 | 更连续,|S 21 |提高了1.7 dB。显然,所提出的校准方法具有更简单的校准过程和对校准标准的要求不那么严格,而校准标准是毫米波和太赫兹频率下晶圆系统校准的关键。更重要的是,新的校准方法更适合DUT具有可变长度的测量。
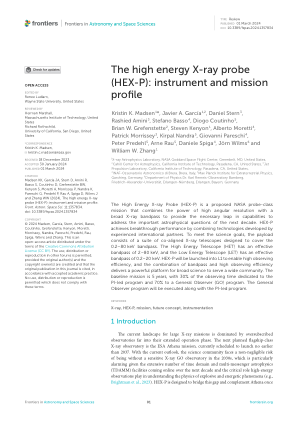
高能X射线探头(HEX-P)
高能 X 射线探测器 (HEX-P) 是 NASA 提出的一项探测器级任务,它将高角分辨率与宽 X 射线带通相结合,为解决未来十年的重要天体物理问题提供了必要的能力飞跃。HEX-P 通过结合经验丰富的国际合作伙伴开发的技术实现了突破性的性能。为了实现科学目标,有效载荷由一套共线 X 射线望远镜组成,旨在覆盖 0.2-80 keV 带通。高能望远镜 (HET) 的有效带通为 2-80 keV,低能望远镜 (LET) 的有效带通为 0.2-20 keV。HEX-P 将发射到 L1 以实现高观测效率,带通和高观测效率的结合为广泛的科学服务于广大社区提供了强大的平台。基线任务为 5 年,其中 30% 的观测时间用于 PI 主导的项目,70% 用于一般观察 (GO) 项目。一般观察项目将与 PI 主导的项目一起执行。

LBB 电感式探头 - 测量传感器
线性球轴承 (LBB) 系列尺寸测量探头专为质量控制和计量应用中的高精度和可重复测量而设计。测量探头内的 LBB 可最大限度地减少径向游隙和摩擦,实现超高精度测量。轴承组件利用两排圆周微型球,由固定器固定到位。球位于非旋转柱塞上,柱塞硬化至洛氏 65 级,镀硬铬并经过精密研磨,可实现最佳重复性和抗压痕性。柱塞的接触端有一个可拆卸的碳化钨球头,带有 AGD 标准 4-48 UNF-2A 螺纹。柱塞和轴承封装在圆柱形外壳中,手工打磨并安装到滚珠轴承组件上。精密配合可提供出色的测量头重复性。由于轴承和外壳的硬度基本匹配,柱塞可以更好地承受侧向载荷,从而延长设备寿命。LVDT 配置


Neuropixels 2.0:用于稳定的微型高密度探头......
原理:为此,我们设计了一款微型探头,称为 Neuropixels 2.0,其 5120 个记录点分布在四个柄上。探头和头台被微型化为原始尺寸的三分之一左右(即 Neuropixels 1.0 探头的尺寸),因此两个探头及其单个头台仅重 ~1.1 克,且不会损失通道数(每个探头 384 个通道)。使用两个四柄探头可在一次植入中提供 10,240 个记录点。为了在脑部运动时也能实现稳定的记录,我们优化了记录点的排列。该探头具有更密集的线性化几何形状,可使用新设计的算法进行事后计算运动校正。该算法在 Kilosort 2.5 软件包中实现,可从脉冲数据确定随时间的运动,并使用空间重采样对其进行校正,就像在图像配准中一样。
Active Motif EpiShear™ 探头超声波仪手册
在某种程度上,汽车的速度/巡航控制可以比作超声波处理器。速度/巡航控制旨在确保您的车辆保持恒定的行驶速率或速度。随着地形的变化,车辆保持恒定速度的功率要求也会发生变化。如果您已设置巡航控制并开始上坡,则发动机必须产生更多功率(RPM 或每分钟转数)才能保持恒定速度。巡航控制可以感知这些要求并自动调整发动机提供的功率以补偿不断变化的条件。因此,在这个例子中,瓦数可以被认为是发动机的 RPM,振幅是保持的恒定速度。

用于医疗的紧凑型光纤漫反射探头...
2 聚氨酯光学幻影的制备与表征 ......................。。11 2.1 简介。。。。。。。。。。。。。。。。。。。。。.................11 2.2 材料和方法 ...................................13 2.2.1 元件材料选择 .。。。。。。。。。。。。。。。。。。。。。13 2.2.2 初步研究。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。14 2.2.3 模型设计。。。。。。。。。。。。。。。。。。。。。。。。。。。。。17 2.2.4 组织模体制作方法 ................18 2.2.5 模体光学特性测试 ..................20 2.3 结果与讨论 ................................22 2.3.1 吸收特性 ..........................22 2.3.2 散射体特性 ..........................23 2.3.3 幻影光学特性 ...。。。。。。。。。。。。。。。。。。。。24 2.4 结论。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。39