XiaoMi-AI文件搜索系统
World File Search System探索的
微型相机——太空探索的眼睛
• 产量:每周 800 件,2020 年交付超过 30,000 件产品 • 2021 年中期将有超过 180,000 个模块投入使用 • 业务区域:35% 欧洲、35% 亚洲、30% 北美

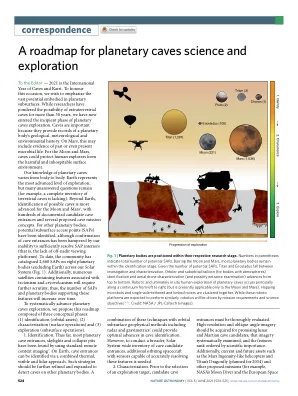
行星洞穴科学与探索的路线图
编辑 - 2021年是洞穴和喀斯特国际年。为了纪念这一场合,我们希望强调行星亚面体现的巨大潜力。尽管研究人员已经考虑了50多年的外星洞穴的可能性,但我们现在进入了行星洞穴探索的初期。洞穴很重要,因为它们提供了行星机构的地质,气象和环境历史的记录。在火星上,这可能包括过去甚至现在微生物生活的证据。对于月球和火星,洞穴可以保护人类探险者免受有害和荒凉的表面环境。我们对行星洞穴的了解因身体而异。地球代表了最先进的探索水平,但是仍然存在许多未解决的问题(例如,缺少陆地洞穴的完整清单)。超越地球,对月球和火星1的识别最先进,有数百个有记录的候选洞穴入口和几个拟议的洞穴任务概念。对于其他行星体,已经确定了潜在的地下接入点(SAP),尽管我们无法充分解决SAP Interiors(即缺乏距离视觉平台)的确认受到了阻碍。迄今为止,社区已经在我们的太阳系上对八个行星体(不包括地球)进行了2,660个SAPS分类(图1)。1。标识。到目前为止,通过使用标准远程上下文成像2可以找到大多数行星洞穴的入口,天窗和倒塌坑。a此外,许多卫星包含与构造和冰可旋转的特征相关的特征将需要进一步审查。因此,支持这些特征的SAP和行星体的数量会随着时间的推移而增加。为了系统地推进行星洞穴的探索,我们提出了由三个概念阶段组成的路线图:(1)识别(轨道资产),(2)表征(表面操作)和(3)探索(地下操作)。在地球上,可以通过组合的热,可见和激光射方法来识别洞穴入口。应进一步完善这些策略,并扩展以检测其他行星体的洞穴。

有机硅是欧洲太空探索的关键推动者
欧盟 (EU) 已承诺实施一项雄心勃勃的太空政策,以促进其可持续和数字化转型。作为欧盟太空计划的支柱之一,欧洲地球观测 (EO) 系统“哥白尼”提供大气、海洋和陆地监测服务,以及气候变化、应急管理和安全服务。有机硅是太空技术的关键推动因素,有助于欧盟充分利用其在该领域的工业和科学能力。

用于行星探索的无人机:建模挑战
在过去十年中,太空探索的力度大大增加,因此需要新的方法来研究行星和其他天体。现代趋势是制造能够从更高角度侦察表面的航天器,而无人机已被证明是最有用的。一般来说,无人机以其灵活性、速度、悬停能力、避障、目标跟踪和跟随而闻名。认为任何类型的无人机都适合太空应用都是合理的,因为它们都具有可以满足任务要求的优势。太空领域的设计选择深受一些限制的影响,例如最大尺寸、总重量、成本、环境、温度。此外,还需要考虑使平台能够执行任务的基本要求,这些要求通常由各种子系统来确保:热、通信、机载数据处理、电力、推进以及制导、导航和控制。太空探索的主要焦点是火星和旋翼机概念:事实上,Ingenuity 直升机就是一个很好的例子,如图 1 所示,它于 2021 年在红色星球上进行了首次飞行。火星大气与地球不同,这带来了特殊的空气动力学挑战。第一个很大的变化是低大气密度,再加上无人机尺寸有限,导致弦基雷诺数流动非常低(103-104)[1]。这些流动更多的是以粘性力而非惯性力为特征,导致机翼性能效率下降。这会影响升力,但较低的重力加速度(3.71 m/s2)略微补偿了升力。自 20 世纪 30 年代以来,人们在该领域进行了各种研究,并且可以确定三个描述流动行为的区域:亚临界( Re < 10 5 )、临界( Re ∼ 10 5 )和超临界( Re > 10 5 )。对于火星研究,重点放在亚临界区域,其中层流边界层倾向于分离,导致阻力系数较大,升力系数降低。这种层流分离流的不稳定性导致向湍流的转变,这会引起重新附着,从而产生层流分离气泡,影响翼部的性能。可以采用各种方法来进行气动分析:例如,将流动视为完全层流 [2] 或使用 RANS、LES

空间探索的新时代:揭开宇宙超越
空间探索的新时代的特点是一系列巨大的里程碑,这些里程碑扩大了人类成就的界限。SpaceX,Blue Origin和Virgin Galactic等私人公司在重新定义太空旅行的可能性方面发挥了关键作用。这些实体已经开创了可重复使用的火箭技术,大大降低了将有效载荷和人类推向太空的成本。SpaceX的Falcon 9火箭可以发射和登陆多次,从而使空间更具成本效益和可持续性。此外,国际空间站(ISS)证明了国际合作,代表了在低地球上建立可居住的哨所的全球努力。国际空间站不仅是科学研究的平台,而且还可以作为未来深空任务的垫脚石,从而促进了使地球生命受益的技术进步。火星已成为这个新时代的焦点。各种太空机构和私人公司正在努力工作,将船员的错误派往红色星球。NASA的毅力漫游者成功地降落在火星上,不仅在进行科学探索,而且还在测试未来人类任务的技术,例如从火星大气中产生氧气。埃隆·马斯克(Elon Musk)的SpaceX制定了一个大胆的计划,在火星上建立一个自我维持的殖民地,设想了人类成为多层次物种的未来。空间探索的新时代不仅限于我们的太阳系;它延伸到宇宙的最远。Starship是目前正在开发的完全可重复使用的航天器,旨在将大量乘客和货物运送到地球以外的目的地,彻底改变了行星际旅行。望远镜这样的望远镜望远镜为我们提供了遥远星系和星云的令人叹为观止的图像,扩大了我们的理解

用于探索的灵活月球结构——FLARE——...
灵活月球探索架构 (FLARE) 的概念是将四名机组人员送上月球表面,在月球表面停留至少七天,然后安全返回地球。只要组件车辆投入运行,FLARE 就可以实施。FLARE 是作为 NASA 载人着陆系统 (HLS) 参考架构的替代方案而开发的,该架构来自 2019 年创建的设计分析周期 (DAC) #2。DAC2 指南要求在近直线晕轨道 (NRHO) 中使用 Gateway 车辆。相反,FLARE 选择低月球冻结极地轨道 (LLFPO) 进行组件的月球会合,并选择 Gateway 车辆。LLFPO 提供每 2 小时飞越南极一次的稳定轨道,确保可以轻松进入月球表面进行表面中止,并且推进剂需求比 NRHO 低得多。最小 FLARE 概念使用一次太空发射系统 (SLS) 发射、一个猎户座火箭、一个欧洲服务舱 (ESM) 和一个载人着陆器(通过商用飞行器发射)。FLARE 增加了 SpaceTug,它以成熟成功的 ULA“通用”半人马座上面级运载火箭为基础,经过修改后可打造出地月转移飞行器。在 FLARE 基线任务中,SpaceTug 提供将猎户座 + ESM 从 LLFPO 返回地球所需的推进力。SpaceTug 还提供推进力,将单独的载人着陆器组件——下降组件 (DE) 和上升组件 (AE)——从低地球轨道 (LEO) 运送到 LLFPO。然后,SLS Block 1 发射猎户座 + ESM,并与 LLFPO 中配对的 DE + AE 组件完成会合。FLARE 提供基线任务以外的可选阶段。 SpaceTug 可以将计划中的 Gateway 组件(包括动力和推进元件 (PPE) 和居住和后勤前哨 (HALO))运送到 LLFPO。FLARE 提供了一种将前体设备运送到月球表面以增强和延长载人任务的选项。借助这些组件(包括充气居住舱和气闸舱、个人机组人员机动车、现场资源利用 (ISRU) 演示以及科学和技术实验),机组人员可以在月球表面探索和进行科学研究长达 14 天。
用于太空探索的铌 C-103 合金
您使用和应用我们产品、技术援助和信息(无论是口头、书面还是通过生产评估),包括任何建议的配方和建议的条件,均超出我们的控制范围。因此,您必须测试我们的产品、技术援助和信息,以确定它们是否适合您的预期用途和应用。这种特定于应用的分析至少必须包括测试,以确定从技术以及健康、安全和环境角度的适用性。此类测试不一定由 HC Starck Solutions 完成。所有信息均不提供任何担保或保证。明确理解并同意,客户承担并在此明确免除 HC Starck Solutions 因使用我们的产品、技术援助和信息而产生的任何侵权、合同或其他责任。本文未包含的任何声明或建议均未经授权,不对 HC Starck Solutions 具有约束力。本文中的任何内容均不得解释为建议使用与涵盖任何材料或其用途的专利相冲突的任何产品。任何专利的权利要求均不暗示或实际上授予任何许可。本文提及的产品属性一般不应归类为待售物品属性的信息。订购时请参考相应产品数据表的发行号。所有交付均基于最新发行的产品数据表和我们最新版的销售和交付一般条款。

教育政治及其对人类火星探索的影响
文章中,作者简要分析了文化史中政治与教育的关系,并由此确认了教育政治的相关性。研究了教育政治影响年轻一代本体论的可能性。特别是,研究了教育政治通过教师培训系统的现代化和国家的家庭政策对社会发展的影响。作者主要侧重于阐明教育政治在公立学校中的影响机制。作者得出结论,教育政治影响年轻一代的方式之一是创造某些“神话触发”,并通过使用各种脑神经编程技术来维护其相关性。作者研究了“太空探索的需要”和“人类探索火星”等神话触发的形成特征、行动顺序和影响的后果。关键词:教育政治、学校政治、太空探索、脑神经编程技术、神话触发、人类探索火星、