XiaoMi-AI文件搜索系统
World File Search System控制回路

算法决策与控制问题
摘要 多年来,研究复杂机器人类操作员的工业心理学家和工程师已经认识到,人类操作员将责任转移给机器,而无法发现机器故障的情况,这种危险是存在的。我们称之为“控制问题”,理解为人机控制回路中的人在面对可靠自主系统的输出时,容易变得自满、过度依赖或过度缺乏自信。虽然控制问题已经研究了一段时间,但到目前为止,它在机器学习环境中的表现还没有受到重视。本文旨在填补这一空白。我们认为,除某些特殊情况外,算法决策工具不应用于高风险或安全关键决策,除非相关系统在相关决策领域或子领域明显“优于人类”。更具体地说,我们推荐三种策略来解决控制问题,其中最有希望的策略涉及高效算法工具与人类代理之间的互补(且可能动态)耦合。我们还确定了所有此类人机系统在设计中都应反映的六个关键原则。这些可以作为评估任何此类人机系统可行性的框架,也可以作为指导此类系统的设计和实施的框架。

模块化线性驱动低温冷却器电子设备
公司将可配置、高功率电机驱动器与精确遥测功能相结合,设计易于抗辐射。位于低温冷却器附近的遥测聚合单元 (TAU) 通过在本地数字化传感器数据以传输回控制器,最大限度地减少了敏感低温冷却器反馈的衰减和污染,而主控制单元 (MCU) 中的多个 500 W 驱动通道以高达 95% 的效率提供功率波形。模块化设计概念允许在需要额外通道时添加驱动卡,或移除驱动卡以减小尺寸、重量和功耗。TAU 包含多达 14 个外部传感器,总数据速率高达每秒 800,000 个样本,由控制软件动态分配给任何遥测组合。可以通过安装商用组件或利用替代控制方案降低抗辐射控制器组件的成本来实现低成本版本的电子设备。在雷神公司进行了一次铜板演示,其中驱动了高容量 RSP2 (HC-RSP2) 低温冷却器,温度和振动控制回路在高功率和低温下关闭。本文讨论了 MACE 的开发、测试和经验教训。

电池能量系统集成对风电电网频率控制的影响
摘要:可再生能源快速融入电网,对全球惯性减小的动态响应提出了新的挑战。在这方面,最近有人研究了这种减小对频率稳定性的影响以及风力发电的潜在支持。然而,众所周知,风力发电的变化及其减小的惯性可能不足以处理电力不平衡。储能系统(例如电池)可以提供所需的额外灵活性,以确保正确响应。本文分析了用于支持风力发电和电池频率的不同控制回路如何相互作用和运行。为了深入了解不同的影响,对通过(i)变速风力涡轮机的惯性和下垂控制和(ii)电池进行频率调节进行了灵敏度分析比较。分析是通过使用著名的 4 发电机 2 区域模型进行模拟进行的,该模型经过调整以包括风电场。从电池的角度来看,其斜坡能力会发生变化以提供频率调节。本文展示了频率响应如何因控制参数和电池尺寸的不同而变得不稳定,这取决于各种技术的相互作用。因此,它表明,电网中不同参与者(如电池和风能)之间的协调行动、控制优化和电网状态是稳定运行所必需的。

自动化、团队合作以及令人担忧的安全损失
在各种控制系统中,自动化的实施是为了提高效率和安全性。随着自动化的提高,将自动化视为团队成员而不是工具变得越来越重要。在最佳情况下,人机自动化团队合作将工作量保持在可接受的范围内,提高态势感知能力,并让操作员处于控制回路中。然而,只有在自动化的开发中考虑到人类操作员,人机自动化团队合作才会蓬勃发展。因此,调查当前有关自动化和团队合作的经验和期望对于自动化的发展非常重要。通过对空中交通管制员 (ATCO) 的调查问卷,本研究旨在调查 ATCO 如何看待当前和未来空中交通管制系统中的自动化和安全性,以及不同团队合作因素对人与人、人与自动协作的重要性。结果表明,ATCO 认为,只要自动化按预期运行,未来安全性会随着自动化的提高而提高。空中交通管制员表示担心自动化会导致技能下降和失去态势感知能力,这种担心与空中交通管制员的新角色有关,即监控系统并在自动化发生故障时接管。结果表明,针对空中交通管制员重视的人机协作方面进行设计,例如适应性或相互绩效监控,可能是前进的方向。
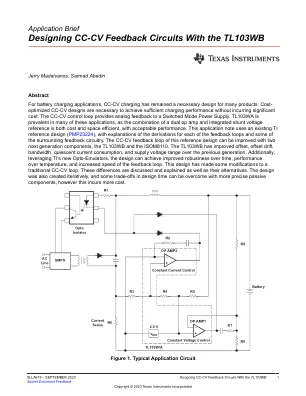
使用TL103WB设计CC-CV反馈电路
用于电池充电应用程序,CC-CV充电仍然是许多产品的必要设计。成本优化的CC-CV设计对于实现足够的充电性能而不产生大量成本是必要的。CC-CV控制回路为开关模式电源提供了模拟反馈。tl103wa在许多这些应用中都普遍存在,因为双重操作放大器和集成的分流电压参考的组合既具有成本又是空间效率,并且具有可接受的性能。本应用程序使用现有的Ti参考设计(PMP23224),并解释了每个反馈回路的派生和一些周围的反馈电路。使用两个下一代组件TL103WB和ISOM8110可以改进此参考设计的CC-CV反馈回路。TL103WB在上一代中改善了偏移,偏移漂移,带宽,静止电流和供应电压范围。此外,利用Ti的新光发光器,该设计可以随着时间的流逝而提高鲁棒性,在温度上的性能以及反馈回路的速度提高。这种设计对传统的CC-CV循环进行了一些修改。讨论和解释了这些差异及其替代方案。设计也是迭代创建的,并且可以通过更精确的被动组件克服设计时间的某些权衡,但是这会增加成本。

诡计还是热力?利用整流攻击操纵关键的基于温度的控制系统
温度传感和控制系统广泛用于关键过程的闭环控制,例如维持患者的热稳定性,或用于检测与温度相关的危险的报警系统。然而,这些系统的安全性尚未完全探索,留下了潜在的攻击面,可以利用这些攻击面来控制关键系统。在本文中,我们从安全性和安全的角度研究了基于温度的控制系统的可靠性。我们展示了对模拟温度传感组件进行物理级攻击如何导致意想不到的后果和安全风险。例如,我们证明攻击者可以远程操纵婴儿孵化器的温度传感器测量值以引起潜在的安全问题,而不会篡改受害系统或触发自动温度警报。这种攻击利用了运算放大器和仪表放大器中可能产生的意外整流效应来控制传感器输出,欺骗受害系统的内部控制回路加热或冷却。此外,我们展示了利用这种硬件级漏洞如何影响具有相似信号调节过程的不同类别的模拟传感器。我们的实验结果表明,这些系统中通常部署的传统防御措施不足以减轻威胁,因此我们提出了一种用于关键应用的低成本异常检测器的原型设计,以确保温度传感器信号的完整性。

评估数字仪器和控制的安全性...
图 1. 每个控制器都包含一个受控过程的模型 2. 安全控制结构示例 3. 图 2 中操作过程的安全控制结构示例 4. 列车门控制器的简单安全控制回路 5. 不安全控制行为的结构 6. 导致危险的因果因素分类 7. 压水反应堆 8. 高级 PWR 安全控制结构 9. MSIV 的安全控制结构 10. 导致操作员不安全控制行为的因果因素 11. 导致操作员控制行为不被遵循的因果因素 12. 导致 DAS 不安全控制行为的因果因素 13. 导致 DAS 控制行为不被遵循的因果因素 14. 导致 PS 不安全控制行为的因果因素 15. 导致 PS 控制行为不被遵循的因果因素 表格 1. 事故和危险示例2. 简单列车门控制器的不安全控制动作 3. 所提供类型的示例上下文表 4. 未提供类型的示例上下文表 5. 系统级事故 6. 系统级危险 7. 关闭 MSIV 的不安全控制动作 8. 操作员提供关闭 MSIV 控制动作的上下文表 9. 未提供关闭 MSIV 的上下文表 10. 安全约束

肌电信号的电触觉反馈的空间和频率编码相结合
摘要 电触觉刺激已广泛用于人机界面,为用户提供反馈,从而闭合控制回路并提高性能。编码方法是电触觉界面的重要组成部分,它定义了反馈信息到刺激曲线的映射。理想情况下,编码将提供反馈变量的高保真表示,同时易于被受试者感知和解释。在本研究中,我们进行了一个闭环实验,其中离散和连续编码方案相结合,以利用这两种技术的优势。受试者执行肌肉激活匹配任务,仅依靠代表产生的肌电信号 (EMG) 的电触觉反馈。具体而言,我们研究了两种不同编码方案(空间和空间与频率相结合)在两种反馈分辨率(低:3 和高:5 个间隔)下的性能。在这两种方案中,刺激电极都围绕上臂放置。标准化 EMG 的幅度被分为间隔,每个电极与一个间隔相关联。当生成的 EMG 进入其中一个间隔时,相关电极开始刺激。在组合编码中,活动电极的额外频率调制还指示间隔内信号的瞬时幅度。结果表明,当分辨率较低时,组合编码会降低下冲率、变异性和绝对偏差,但当分辨率较高时则不会,反而会使性能变差。这表明组合编码可以提高 EMG 反馈的有效性,但这种效果受到肌电控制固有变异性的限制。因此,我们的研究结果提供了重要的见解,并阐明了在使用电触觉刺激传递具有高变异性的反馈信号(EMG 生物反馈)时信息编码方法的局限性。

制造工艺杂志
使用激光束的热丝定向能量沉积 (DED-LB/w) 是一种金属增材制造 (AM) 方法,具有材料利用率和沉积速率高的优点,但 DED-LB/w 制造的零件存在热输入较大和表面光洁度不理想等问题。因此,在沉积过程中调节工艺参数和监测工艺特征以控制最终质量对于确保最终零件的质量至关重要。本文探讨了 DED-LB/w 工艺的动态建模,并介绍了一种参数-特征-质量建模和控制方法,以提高建模质量和对无法现场测量的零件质量的控制。该研究调查了影响单层和多层焊珠中熔池宽度(特征)和焊珠宽度(质量)的不同工艺参数。提出的建模方法使用参数特征模型作为 F 1 和特征质量模型作为 F 2 。比较了线性和非线性建模方法来描述工艺参数和工艺特征即熔池宽度 (F 1 ) 之间的动态关系。采用全连接人工神经网络根据熔池特征 (F 2 ) 对最终部件质量(即熔滴宽度)进行建模和预测。最后,通过将参数特征 (F 1 ) 和特征质量 (F 2 ) 模型集成到部件宽度的闭环控制中,测试并验证了所提出的参数特征质量建模的有效性和实用性。与仅使用 F 1 的控制回路相比,所提出的方法显示出明显的优势,并有可能应用于控制无法直接测量或现场监测的其他部件质量。

从预解码上肢复杂运动...
近年来,脑机接口 (BCI) 已被提议作为中风后神经康复的一种手段 [1, 2]。研究表明,BCI 可以人工关闭因病变而中断的运动控制回路。BCI 可以通过脑电图解码尝试运动,并触发外骨骼或电刺激等设备,这些设备可以响应尝试运动提供相关的躯体感觉反馈 [3-6]。通过将与尝试运动和躯体感觉反馈相关的皮质活动配对,推测可以诱导与赫布相关的可塑性 [7]。多项研究概述了使用 BCI 进行中风康复的临床效果,其中普遍趋势是患者可以诱导可塑性并改善运动功能 [8-11]。为了进一步完善 BCI 在运动障碍康复中的应用,下一步可能是解码比简单的孤立运动更复杂、更具临床相关性的功能性运动,尽管它们也很重要。使用更加复杂的现代外骨骼,这些复杂的运动也更容易实现。然而,限制因素可能是从单次脑电图中解码功能性运动,因为记录的电活动是潜在活动的模糊图像,例如由于体积传导 [12]。先前的研究表明,可以解码具有不同动力学特征的不同运动类型 [4, 6, 13, 14],但这主要是简单的孤立运动,例如踝关节背屈或腕关节伸展/屈曲。此外,同一肢体的不同运动类型也已被解码 [15, 16]。研究还表明,可以从脑电图中检测到更复杂的运动,例如 [17],但要用于诱导可塑性的康复,仅应使用运动前活动来实现传出活动和体感反馈之间的严格时间关联 [18]。预计体感反馈应在最大传出活动 [7] 后不到 200-300 毫秒内到达皮质层,此时运动控制信号被发送到脊髓。这限制了可用于解码预期运动的判别信息量。尽管 EEG 的空间分辨率有限,但硬件(放大器和电极)和信号处理技术不断改进,可能可以从单次试验 EEG 中解码复杂的功能性运动。