XiaoMi-AI文件搜索系统
World File Search System控制方案
![arxiv:2012.01998v1 [Quant-ph] 2020年12月3日](/simg/5\5645af61820431fab4deca1b2dc2eb6b56700c11.webp)
arxiv:2012.01998v1 [Quant-ph] 2020年12月3日
量子系统可以由其他量子系统以可逆的方式控制,而无需泄漏到系统 - 控制器化合物外部的任何信息。这种相干的量子控制是确定性的,不如基于测量的反馈控制嘈杂,并且在各种量子技术中具有潜在的应用,包括量子计算,量子通信和量子计量学。在这里,我们引入了一个连贯的反馈协议,该协议由与控制量子系统相同的相互作用组成,该量子系统将量子系统从任意初始状态转移到目标状态。我们确定了将收敛到目标状态的广泛类别的相干反馈通道,然后稳定并保护其免受噪声的保护。我们的结果表明,如果较高的频率出现,系统 - 控制器的相互作用也可以抵抗噪声。我们提供了一个控制方案的示例,该方案不需要对控制器中编码的目标状态的了解,这可能是量子计算的结果。因此,它提供了一种自主,纯量子闭环控制的机制。

SEL应用指南
要充分利用这些系统,并为所有者,操作员和网格提供最大的好处,基于逆变器的DER需要准确可靠的控制。使用适当的控制方案,可以通过以下方式优化许多用例:1)实施连接电网的逆变器,2)补充当地能源需求,3)最大化能源出口,4)提供服务以减少工业或公用事业用户的本地负载的服务。存储和电池资产提供了满足各种用例的机会,例如减少峰值需求,从而减少需求充电并增强可靠性方案;但是,为了有效利用存储,资产通常需要集成,以与其他电力系统资产进行管理,并在常见耦合点(PCC)后面进行处理。管理和与其他资源进行协调的控制器允许优化用例和操作模式之间的动态切换。电荷管理状态,时间变化的生成和峰值需求减少是一些电池的应用,需要在多个DER之间使用控制器。

具有随着时间变化的不确定性的非线性MIMO系统的基于深的学习的PID调整策略
摘要:将比例综合衍生(PID)控制方案应用于非线性多输入,多数输出(MIMO)系统,具有时间变化的不确定性是有挑战性的,并且毫无争议。在这项研究中,我们制定了基于深入的增强学习(RL)的PID调整策略,并在设计RL代理方面具有关键新颖性,以实现实时自适应MIMO PID调整以跟踪设定点,同时考虑时间变化的不确定性。我们评估了我们的调整策略,这些策略受到时变不确定性的连续搅拌坦克反应堆。传统的PID未能跟踪废水浓度设定点并引起较大的错误和偏移,但提出的RL代理可以快速准确地进行设定值跟踪,从而大大减少了错误并消除了偏移。因此,使我们的基于RL的策略在时间变化的不确定性下对化学工程应用有吸引力。关键字:增强学习,PID控制,MIMO系统,随时间变化的不确定性,自适应控制
基于地形力学的动态模型...
摘要 - 基于Terramogealics的轨道车辆(TRV)的动态模型被广泛用于动态分析中。但是,由于其高复杂性和计算成本,这些模型与基于模型的控制器设计不相容。本研究提出了一种新型且简化的基于TRAMEGRAINIC的动态模型,可用于基于优化的实时运动控制器设计。到此为止,我们使用轨道剪切应力的平均项近似轨道的相互作用,以使模型在计算上有效且可线化。通过在轮式车辆场中引入滑动比和滑动角的概念,最终将基于Terramogearics的动态模型简化为紧凑而实用的单轨动态模型,从而降低了对精确滑移比的需求。单轨模型使我们能够通过分别考虑侧面和纵向动力学来设计有效的运动控制方案。最后,在各种道路条件下使用实际TRV对提出的动态模型进行了验证和验证。此外,在模拟中比较了不同模型的性能,以证明所提出的模型在TRV路径遵循任务中的表现优于现有模型。

自主四轮驱动器的控制器设计,用于增强空中监视和情境意识
摘要 - 由于其可操作性,多功能性以及访问遥远而充满挑战的地形的能力,使用无人驾驶汽车(UAV)进行航空监视操作引起了显着关注。在本文中,基于加速度的控制器使用基于Lyapunov的控制方案为四轮摩托车无人机设计,以在一系列航空监视任务中增强其性能。使用所提出的算法,可以优化四轮驱动器的机动功能,从而在障碍物环境中进行监视任务期间进行精确的运动。通过计算机模拟,根据稳定性和准确性评估了基于加速度的控制器的性能。结果表明,所提出的控制器表现出成功的导航,使Quadcopter能够以提高的效率和可靠性执行复杂的监视操作。这项研究有助于四轮技术在航空监视应用中的适用性,为提高情境意识铺平了道路,并有效监测了一系列针对性领域的各种执法和安全操作。索引术语 - Quadcopter,监视区域,航空导航,Lyapunov功能

具有可证明稳定性的涵道风扇无人机悬停至高速平飞过渡的神经网络控制
摘要 本文主要研究涵道风扇垂直起降 (VTOL) 无人机 (UAV) 的过渡控制。为了实现从悬停到高速飞行的稳定过渡,提出了一种基于神经网络的控制器来学习系统动态并补偿飞机动态和所需动态性能之间的跟踪误差。首先,我们推导了飞机全包络动力学的非线性系统模型。然后,我们提出了一种基于神经网络的新型控制方案并将其应用于欠驱动飞机系统。所提出的控制器的主要特征包括投影算子、状态预测器和动态形成的自适应输入。证明并保证在整个神经网络学习过程中,状态预测器和神经网络权重的跟踪误差都有上限。高度自适应的输入形成动态结构,有助于实现所提出的控制器可靠的快速收敛性能,尤其是在高频扰动条件下。从而使飞行器的闭环系统能够以期望的动态性能跟踪一定的轨迹,仿真和实飞试验均取得了满意的结果,完成了设计的飞行路线。
在 NAV54 上强制使用 ECDIS - DNV - Digital Ship
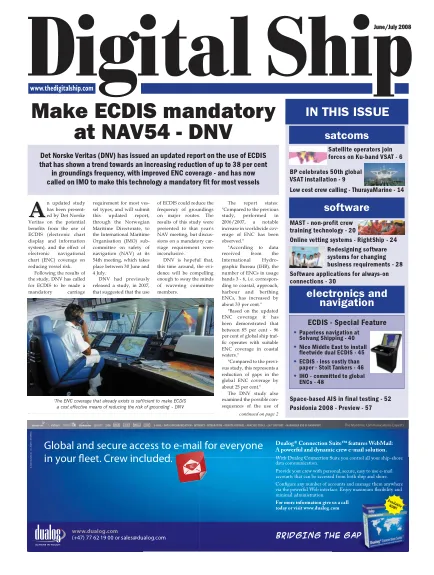
ECDIS 成本 成本效益问题肯定是船舶运营商特别感兴趣的。如果事实证明 ECDIS 在一定年限内比同类纸质海图成本更低,那么选择这项技术的决定就会变得容易得多,而且对任何强制性携带要求的依赖性就会大大降低。在这项研究中,成本效益是根据“避免死亡总成本”(GCAF)和“避免死亡净成本”(NCAF)来评估的,适用于新船和现有船舶。研究发现,对于所有类型和尺寸的货船,GCAF 始终高于 300 万美元。然而,NCAF 却低于 300 万美元,对于许多不同船龄和尺寸的船,NCAF 甚至为负数。DNV 表示,由于这些数字与 IMO 当前计算成本效益的做法一致,因此证明 ECDIS 是一项不错的投资。根据 IMO 惯例,如果 GCAF = 300 万美元或 NCAF = 300 万美元,风险控制方案就是具有成本效益的。通过这些计算,DNV 得出的估计值将使 ECDIS 成为降低各种船型大于一定阈值的船舶风险的一种具有成本效益的手段。
有翼电动垂直起降飞机的轨迹生成与跟踪控制
目前,有翼 eVTOL 无人机的控制方法主要将飞行器视为固定翼飞机,并在起飞和降落时增加垂直推力。这些方法提供了良好的远程飞行控制,但未能考虑飞行器跟踪复杂轨迹的完整动态。我们提出了一种轨迹跟踪控制器,用于有翼 eVTOL 无人机在悬停、固定翼和部分过渡飞行场景中的完整动态。我们表明,在低速到中速飞行中,可以使用各种俯仰角实现轨迹跟踪。在这些条件下,飞行器的俯仰是一个自由变量,我们使用它来最小化飞行器所需的推力,从而降低能耗。我们使用几何姿态控制器和空速相关控制分配方案,在各种空速、飞行路径角和攻角下操作飞行器。我们假设采用标准空气动力学模型,为所提出的控制方案的稳定性提供理论保证,并展示模拟结果,结果显示平均跟踪误差为 20 厘米,平均计算率为 800 Hz,与使用多旋翼控制器进行低速飞行相比,跟踪误差减少了 85%。

双轴机载模糊 pid 跟踪控制器... - ijicic
摘要。本文提出了一种基于方位/仰角环跟踪控制器的新型模糊PID控制方案,以提高跟踪实时目标的精度。模糊PID控制器由三个模糊逻辑控制器和一个带模型参考自适应控制的PID控制器组成,其中PID控制器的三个参数的自适应增益由模糊逻辑规则进行微调。所提出的控制算法的隶属函数(MF)与一般算法不同,其中输入和输出的MF彼此不同,例如MF类型,MF数量和显示范围。将所提出的模糊PID控制方法的性能与普通PID控制算法进行了比较。仿真验证了模糊PID控制模型跟踪性能的有效性,该模型具有零超调、良好的瞬态性能和快速收敛跟踪能力。模糊PID跟踪控制算法可以提高系统整体性能,为深入研究基于机载光电稳定平台的控制系统奠定理论基础。关键词:模糊PID,跟踪控制器,优化方案,稳定平台

合作多个机器人操纵器的线性/非线性PID控制:强大的方法A.
摘要:在本文中提出了协作机器人系统的职位/力量控制有效载荷的问题。所提出的方法必须能够在参考轨迹上维护有效载荷的方向/位置,同时通过机器人的末端效应器将有限的力量应用于对象。考虑到这一点,已经提出了线性/非线性PID控制方案,以实现准确稳健的跟踪性能。Lyapunov的稳定性分析用于确认受控系统的稳定性。证明受控系统是稳定的,而对象的方向/位置跟踪误差最终在任何有限的状态空间区域中最终限制为边界(UUB)。它还提供了一些条件,以正确选择以两个定理的形式选择线性/非线性PID控制器的增益。建议的控制器适用于两个配备有效载荷的协调3DOF机器人臂。模拟结果测试了两种类型的轨迹,包括简单和复杂的路径。还将结果与最先进的近似值(Chebyshev神经网络(CNN))的结果进行了比较。