XiaoMi-AI文件搜索系统
World File Search System控制
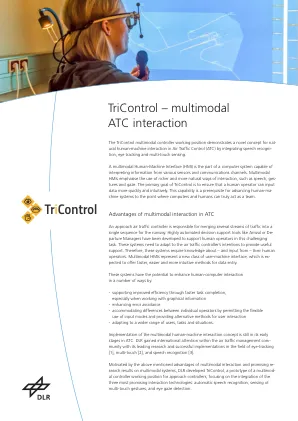
电子膨胀阀开度对恒温恒湿箱系统性能的影响
EEV) 具 有流量调节范围大 、 反应迅速 、 控制精确等特点 [9] , 在定频机组中的应用愈发受到关注 [10] 。 郝文洋 等 [11] 利用电子膨胀阀代替毛细管作为恒温恒湿箱的 节流装置进行实验研究 , 发现改进后箱体温湿度控制
多药耐药者 - 生物控制和控制 -
1.0简介Sherwood Forest Hospitals NHS基金会信托基金会(Trust)认识到,它有责任保护患者,员工,承包商和游客免受感染的影响,并支持有效的系统安排的需求,因此该信托致力于减少医疗保健相关感染的发生率,更重要的是,它是减少信任患者的核心元素。多药耐药的生物具有明显的临床,并在医疗保健提供者环境中引起了预防和控制挑战。某些细菌天然对某些类型的抗菌剂具有抗性,而另一些细菌则会发展或获得抗性。本政策为鉴定高风险群体,隔离和预防跨感染措施,预防手术和侵入性程序的预防以及对处于危险中确定的患者的监视而提供了规定。2.0策略声明本政策描述了实施舍伍德森林医院中建议的协议的责任框架,用于管理和控制多药抗性生物,包括:
2024 年劳动部劳动力发展署桃竹苗分署AI 智慧控制创意竞赛
二、竞赛日期: 113 年5 月29 日(星期三) 08:00-16:00 三、竞赛地点:桃园市方曙商工四、活动网址: http://www.fsvs.tyc.edu.tw 五、办理单位: (一)指导单位:劳动部劳动力发展署桃竹苗分署(二)主办单位:方曙商工高级中等学校、 (三)协办单位:国立勤益科技大学、中华科技大学、万能科技大学、先创国际股份有限公司(四)竞赛时程表:
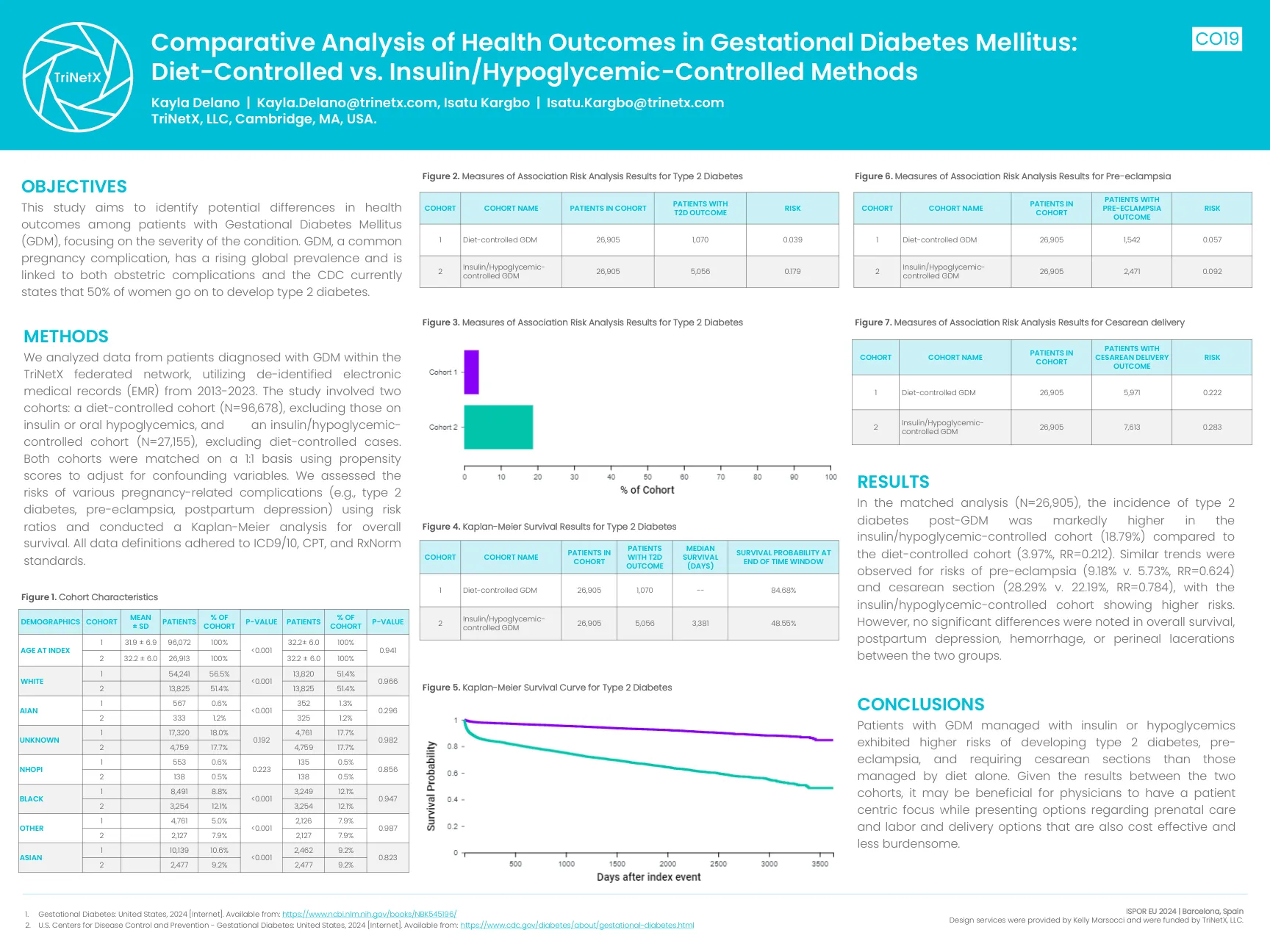
饮食控制 vs. 胰岛素/降血糖控制
我们分析了 TriNetX 联合网络中确诊为 GDM 患者的数据,利用了 2013 年至 2023 年的去识别电子病历 (EMR)。该研究涉及两个队列:一个饮食控制队列 (N=96,678),不包括使用胰岛素或口服降糖药的患者,以及一个胰岛素/降糖药控制队列 (N=27,155),不包括饮食控制病例。两个队列以 1:1 的比例匹配,使用倾向评分来调整混杂变量。我们使用风险比评估了各种妊娠相关并发症(例如 2 型糖尿病、先兆子痫、产后抑郁症)的风险,并对总体生存率进行了 Kaplan-Meier 分析。所有数据定义均遵循 ICD9/10、CPT 和 RxNorm 标准。

工作规划与控制
这里描述的工作计划和控制是 APS 实施综合安全管理 (ISM) 的方法,满足实际操作中工人的安全和健康要求。每位工人都有责任帮助确保阿贡和 APS 维护安全的工作环境。管理人员负责监督其报告的工作,并负责保护工人、公众和环境。APS 安全评估文件中确定了对加速器安全很重要的控制和系统。可信控制是通过安全分析确定的对与保护人员或环境直接相关的安全操作至关重要的控制。停止工作在实际操作的每个要素中,阿贡工作计划和控制手册 LMS-MNL- 10,第 1.5 节,所有人员都有权力和责任在出现迫在眉睫的安全隐患或环境危险时停止工作。行使停工权的个人必须:(1) 确保通知其他工人; (2) 向负责人(PIC)报告其行动,以及 (3) 向其 APS 部门主管或 APS-U 项目主管或更高级的直线经理报告其行动。一旦发出停工指令,工人只能确保工作环境安全;否则,所有参与工作的人员必须遵守停工指令并停止所有工作。只有当负责 APS 部门主管和/或负责 APS-U 工作的 APS-U 项目经理或更高级的经理确认已采取适当的危害控制措施,并且停止工作的个人有机会同意纠正措施时,工人才可以恢复已停止的工作。暂停工作(有时也称为中止工作)工人有权力和责任中止或暂停工作: