XiaoMi-AI文件搜索系统
World File Search System摇摆

狗为什么摇摆尾巴?
尾巴摇摆是家犬(Canis familyis)中的一种明显的行为。尽管人类对此显示有多少意义,但很少研究其定量描述和进化历史。我们总结了这种行为的机制,个体发育,功能和演变的了解。我们建议两个假设,以解释与其他犬科动物相比,狗的出现和频率增加。在驯化过程中,增强的有节奏的尾巴摇摆行为可能会(i)作为其他特征的选择副产品(例如,能力和驯服性),或者(ii)是由人类直接选择的,这是由于我们的节律刺激的倾向。我们通过神经生物学和伦理学实验邀请对这些假设进行测试,这将揭示出最容易观察到但研究研究的动物行为之一。有针对性的尾巴摇摆研究可能是犬类伦理学和特征性人类特征的进化历史的窗口,例如我们感知和产生节奏行为的能力。

狗为什么摇摆尾巴?
尾巴摇摆是家犬(Canis familyis)中的一种明显的行为。尽管人类对此显示有多少意义,但很少研究其定量描述和进化历史。我们总结了这种行为的机制,个体发育,功能和演变的了解。我们建议两个假设,以解释与其他犬科动物相比,狗的出现和频率增加。在驯化过程中,增强的有节奏的尾巴摇摆行为可能会(i)作为其他特征的选择副产品(例如,能力和驯服性),或者(ii)是由人类直接选择的,这是由于我们的节律刺激的倾向。我们通过神经生物学和伦理学实验邀请对这些假设进行测试,这将揭示出最容易观察到但研究研究的动物行为之一。有针对性的尾巴摇摆研究可能是犬类伦理学和特征性人类特征的进化历史的窗口,例如我们感知和产生节奏行为的能力。

狗为什么摇摆尾巴?
尾巴摇摆是家犬(Canis familyis)中的一种明显的行为。尽管人类对此显示有多少意义,但很少研究其定量描述和进化历史。我们总结了这种行为的机制,个体发育,功能和演变的了解。我们建议两个假设,以解释与其他犬科动物相比,狗的出现和频率增加。在驯化过程中,增强的有节奏的尾巴摇摆行为可能会(i)作为其他特征的选择副产品(例如,能力和驯服性),或者(ii)是由人类直接选择的,这是由于我们的节律刺激的倾向。我们通过神经生物学和伦理学实验邀请对这些假设进行测试,这将揭示出最容易观察到但研究研究的动物行为之一。有针对性的尾巴摇摆研究可能是犬类伦理学和特征性人类特征的进化历史的窗口,例如我们感知和产生节奏行为的能力。
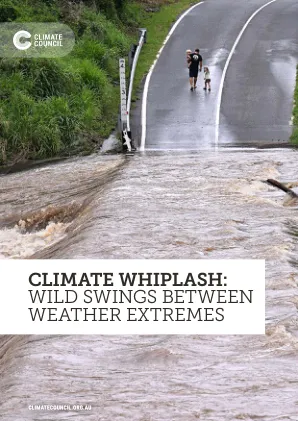
气候鞭打:极端天气之间的狂野摇摆
新年有更多的极端。1月初,维多利亚州中部部分地区的纪录破雨给农村社区带来了又一轮洪水。向北,季风的迟到到达了该国的热带地区,其中包括仍然从Cyclone Jasper湿透的地区。西澳大利亚州继续烘烤,皮尔巴拉(Pilbara)的温度记录损失,珀斯周围的房屋本赛季第三次受到大火的威胁。Kalgoorlie位于珀斯东北600公里处,在雷暴击倒电力基础设施后,留下了极端的温度。随着热量向东蔓延,遥远的Birdsville打破了昆士兰州有史以来最热门的一天的记录,并且在1月26日的公共假期中,包括在悉尼和布里斯班,在东海岸的数百万个艰难的湿度和较高的湿度意味着艰难的条件。
基于比例摇摆的电动反馈改善了横向立场
为了解决感觉丧失和随之而来的平衡问题,已经积极研究了多种运动增强方法,包括外骨骼辅助或功能电刺激(FES)(FES)(Kim等,2012; Chen等,2013)。但是,外骨骼和FES方法都直接适用于运动输出并绕过中枢神经系统(CNS)(Dollahon等,2020)。中枢神经系统的最小参与可能会严重限制增强平衡所需的神经重组。在另一种方法中,可以通过视听增强来间接解决感觉丧失。尽管已经证明了它们的平衡功效,但在治疗结束后它们对保留的影响仍然存在一个问题(Huang等,2006; Roemmich等,2016)。这也许是因为处理视听反馈的内在重大认知参与,这可能会引发一致性问题,这对于促进保留至关重要(Andersson等,2002; Sigrist等,2013)。此外,视听反馈是通信的主要感官方式,因此在交流过程中可以通过分散注意力很容易降低其功效。

下背痛的成年人的自愿姿势摇摆控制和动机
下腰痛(LBP)是一种常见的肌肉骨骼状况,通常伴随着降低的感觉,认知和流动性功能,在全球范围内给予经济健康负担(Chiarotto and Koes,2022年)。LBP的直接和间接经济负担在2008年在美国的19.6至1,188亿美元不等(Dagenais等,2008),澳大利亚的数字约为47亿美元(AU 91.7亿美元)。估计,与LBP相关的成本和残疾的负担将在未来进一步扩大(GBD,2021年)。估计按年龄标准化的观点为7.0%至18.3%[5; 6]。尽管20-29岁的年轻人中LBP的患病率最低,但该年龄段的患病率仍然高达10-15%(Hoy等,2012; Chen等,2022)。lbp不可避免地会影响社会参与,从而导致缺席教育和培训,工作和参与体育(Hartvigsen等,2018)。

改变触觉反馈收益对平衡的影响由感觉冲突估算
抽象轻轻接触实心物体会减少姿势摇摆。在这里,我们确定人为修改触觉反馈以达到平衡的效果。参与者闭着眼睛站着,轻轻地抓住了一个与身体摇摆同步移动的杂志,以系统地增强或减弱+2至2之间的反馈增益,分别对应于与身体相同或相反方向的运动。这种干预对姿势摇摆有系统的影响,姿势摇摆表现出不对称的U形功能,相对于触觉反馈增益。旋转在零增益周围的最小值,对应于静态对象。摇摆以低于-0.25的收益略有增加,但在+0.25以上的增长下大大增加。在+2时,大约是无接触条件的两倍。手和manipulandum之间的平均相互作用力在整个过程中保持<0.9 n,尽管它在极端增长下略有增加。在最少摇摆条件下,手部力和躯干位置之间的互相关最高,这表明更高质量的触觉反馈与更大的摇摆减少有关。我们使用反馈控制模型成功地复制了摇摆行为,该模型在触觉和本体感受信号之间的差异达到阈值时会减弱触觉反馈信号。我们的发现表明,中枢神经系统可以利用增强的触觉反馈来实现Bal-ance,但只有对自然反馈增益的变化相对较小。在健康的志愿者中,它比静态物体提供了最小的好处。触觉反馈是最佳的。


漂移角理论应用于船舶操纵模型。
船舶的六个自由度 ................................................ ..船舶轴线相对于 Eanh 轴线的相对位置 .................................. .涌浪力与涌浪速度之间的图形关系 阻力曲线的图形表示 ................................ .螺旋操纵的图形表示 ................................ ..舵角和角速度图的绘制:(A)动态稳定船舶 ............................................................. ..舵角和角速度图的绘制:(B)动态不稳定船舶 ............................................................. .. GZ 曲线的图形表示:(A)静态稳定船舶 ............................................................. .GZ 曲线的图形表示:(B)静态不稳定船舶 ................................................................ .. 推力曲线的图形表示 ................................................ ..动态稳定船舶的 Kemf Zig zag 机动 动态不稳定船舶的 Kemf Zig zag 机动 ............................................................................................................. .阻力曲线的图形说明 ............................................................................. .比例模型阻力曲线的图形表示 .. .. 纵向拖曳时舵处于攻角的模型方向 ............................................................................. ..显示测量的偏航力矩和舵角的图表 ............................................................................................. .显示测量的摇摆力和舵角的图表 ...... .比例模型阻力曲线图 ................................ ..攻角模型方位图:(A)舵与模型中心线对齐 ........................ .攻角模型方位图:(B)舵与拖曳水池中心线对齐 ........................ .. JL/测量比例模型图示:偏航力矩与摇摆速度图 ........................ .测量比例模型图示:摇摆力与摇摆速度图 ................................ ..平面运动机构图示 ................................ .船首和船尾之间相位差为零的模型轨迹 ............................................................................................. .PM M 下模型的正弦路径...................................... ..模型的旋转臂运动................................................ ..显示测量的摇摆力与角速度的关系的图表............................................................................................. .显示测量的偏航力矩与角速度的关系的图表............................................................................................. ..