XiaoMi-AI文件搜索系统
World File Search System故障状态
FQIS 系列 300 安装手册 - 航空电子设备 Straubing
标称工作电压:28 V 电源电压范围:15 – 32 V 电流消耗:< 0.5A 元件精度:满量程的 ± 1%。更新率:1 秒。显示延迟:可通过引脚绑定在 10 秒 – 60 秒的范围内实现 90% 指示器响应 FQ 状态输出:集电极开路,有效燃油量信号 => 接地最大 50mA 低电平输出:集电极开路,LLS 浸没 => 接地最大 50mA。信号可定制延迟长达 30 秒。输出值延迟:可通过输出连接器内的引脚绑定选择 10 秒至 60 秒的 90% 指示。标准输出:直流电压 最多四个输出: 0V 低于范围(故障状态),0.5 至 4.5 VDC 空至满 5VDC 超出范围 可选输出: 电流:直流电流 最多四个输出: 2 mA 低于范围(故障状态) 4 至 20 mA 空至满 22 mA 超出范围 电阻传感器仿真:最多两个输出:3 至 200 Ω 频率可变信号:最多两个输出:范围为 100 Hz 至 5000Hz RS 232:9600 波特,8 位,偶校验;ARINC 429:高速和低速

第二次发布 VTOL 特殊条件合规方法
影响结构性能或影响其余系统维持结构性能的可靠性的条件,则应满足 VTOL.2205 的规定,以适应放行条件和后续故障。在将 Qj 确定为图 2 和图 3 中安全裕度的放行故障条件和后续故障条件的综合概率时,可以考虑飞行限制和预期运行限制。这些限制应使得处于这种综合故障状态并随后遇到极限载荷条件的概率极小。如果后续系统故障率大于每小时 10 -3,则不允许降低这些安全裕度。

ESD3520系列飞机综合监控系统(AIMS)
输出信号类型 串行数据:差分线路驱动器产生两个哈佛双相通道,电平为 RS-422-A。每秒最多可传输 256 个字。提供其他速度选项。每字 12 位 - 11 位数据加奇校验位 (LSB) B.I.T.E。:集电极开路输出提供 ESD3521A 一般故障状态。记录器控制:集电极开路输出提供记录器的开/关控制。传感器电源:+5V,50mA 电源用于外部电位计。
1395 数字直流驱动器 - 罗克韦尔自动化
第 2 章 故障及指示 一般 ......................。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-1 硬故障。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-1 软故障。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。..2-2 警告故障 ....................。。。。。。。。。。。。。。。。。。。。。。。。............2-2 故障响应选择 ............。。。。。。。。。。。。。。。。。。。。。。。。..............2-2 故障设置参数 ..........。。。。。。。。。。。。。。。。。。。。。。。。.................2-4 故障状态指示器。......。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-5 Bulletin 1300 编程终端。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-7 故障描述及恢复。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-7 HHT 或DHT 故障显示。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-7 系统处理器故障 (SP–XX)。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-7 速度处理器 (VP–XX)。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-12 当前处理器故障 (CP–XX)。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-22 最终故障恢复。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。。2-32
第二次发布 VTOL 特殊条件合规方法
会影响结构性能或影响其余系统维持结构性能的可靠性的状况,则应满足 VTOL.2205 中关于放行状况和后续故障的规定。在将 Qj 确定为图 2 和图 3 中安全裕度的放行故障状况和后续故障状况的组合概率时,可考虑飞行限制和预期运行限制。这些限制应使得处于这种组合故障状态并随后遇到极限载荷状况的概率极小。如果后续系统故障率大于每小时 10 -3,则不允许降低这些安全裕度。

RT® 系列防爆屋顶空调 - 安全空气技术
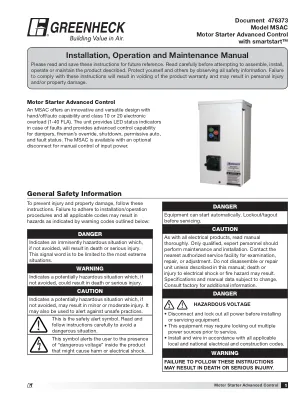
标准控制详情(所有单元 XP) • 内置防短循环定时器以保护单元压缩机 • 制冷剂压力安全电路(如果配备) • 手动复位加热器限制安全电路(如果配备) • 包括远程启动和停止触点 • 固态设计包括电源和控制设备 • 数字温度控制器 • 为电压波动安装 2 级保护。 • 安装了快速连接器,方便连接天花板组件 • LCD 显示屏:室温和设定点温度;模式、故障状态、远程关机状态、压缩机定时器、风扇速度
5065RH
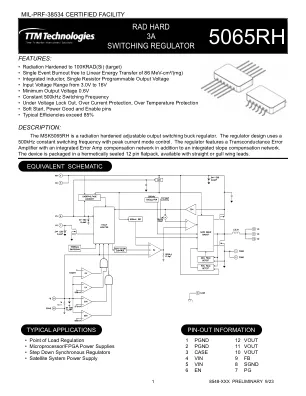
积极的过电流保护 - 过电流保护(OCP)用于采购和下沉输出电流状况。与上部MOSFET平行的准确电流传感器试点设备用于峰值电流控制信号和过电流保护。电流在最正峰和负山谷振幅下的输出电流纹波上被感测并监测,以采购和下沉条件。由于OCP使用的峰值检测,过量的波纹电流降低了直流输出电流能力。如果在先前的八个切换周期中的四个中超过OCP阈值,则会触发 OCP。 在OCP阈值上方的第四电流峰值上,设备进入故障状态,停止切换,并通过输出加载来降低输出。 设备试图在打ic模式下再次打开,当过电流条件消失时,输出软再次启动到受调节的输出电压。 典型的OCP阈值为〜5a,〜1.7倍,额定输出电流为3A,为峰值波纹电流提供了净空。 在软启动期间,在〜6a处有一个额外的过电流保护,以防止短路或以其他方式损坏的负载。 调用后,此故障会进入打ic启动骑自行车,直到成功重新启动为止。OCP。在OCP阈值上方的第四电流峰值上,设备进入故障状态,停止切换,并通过输出加载来降低输出。设备试图在打ic模式下再次打开,当过电流条件消失时,输出软再次启动到受调节的输出电压。典型的OCP阈值为〜5a,〜1.7倍,额定输出电流为3A,为峰值波纹电流提供了净空。在软启动期间,在〜6a处有一个额外的过电流保护,以防止短路或以其他方式损坏的负载。调用后,此故障会进入打ic启动骑自行车,直到成功重新启动为止。

加固学习的安全利润
摘要 - 在某些情况下,任何自主控制器都会不安全。定量确定这些不安全情况何时即将发生的能力对于及时的人类监督,例如货运运输应用至关重要。在这项工作中,我们证明了代理人情况的真正批判性可以牢固地定义为鉴于某些随机行动的奖励的平均减少。可以将实时计算的临界指标(即,不实际模拟随机动作的效果)与真正的临界性进行比较,我们展示了如何利用这些代理指标来产生安全边际,这直接将潜在不正确的行动与预期的损失联系起来,以使其在整体绩效中造成预期损失。我们在ATARI环境中评估了从APE-X和A3C学习的策略的方法,并证明了随着代理的接近故障状态,安全利润如何降低。将安全利润集成到监视部署的代理的程序中,可以实时识别潜在的灾难性情况。
476373 MSAC,修订版4,2024年7月
(手):按下模式按钮手动接合电动机。OFF(重置):按下关闭模式按钮手动脱离电动机。此外,OFF按钮可作为手动重置。按故障旅行后,按住5秒钟以重置起动器。自动:使用自动模式时,启动器由远程开始/停止命令控制。LED状态指标模式LED:使用相应的模式选择(手/OFF/AUTO)照明。闪烁模式LED在最后一个操作模式期间信号出现故障跳闸。所有三个模式LED将在关闭期间或消防员的覆盖操作中同时闪烁。运行LED:启动器时会发出启动信号并检测到流动证明。LED会在存在运行信号时闪烁,而无需流向电动机的流动证明。故障LED:在故障状态或过载旅行时照明。必须返回开启器以重置OFF模式。

大型发动机控制模块(LECM)
iolock。当CPU或I/O模块失败时,看门狗逻辑将其驱动到Iolock条件下,所有输出电路和信号均被驱动到已知的去激化状态,如下所述。必须设计系统,以使Iolock和Power Off状态将导致受控设备的安全状况。•CPU和I/O模块故障将将模块驱动到Iolock状态。•CPU故障将向所有模块和扩展架上主张Iolock信号,以将其驱动到Iolock状态。•离散输出 /继电器驱动程序将无效且能量。•模拟和执行器输出将无活性,并用零电压或零电流脱氧。在各种条件下主张了Iolock状态,包括:•CPU和I/O模块监视案件故障•PowerUp和PowerDown条件•系统重置和硬件/软件初始化•输入配置模式•用户选择注意:其他看门狗详细信息以及这些失败状态在相关的CPU或I/O模块部分中指定了这些故障状态。