XiaoMi-AI文件搜索系统
World File Search System旋转方向

3DEXPERIENCE 平台上的系统工程 - UAS 使用 ......
图 12.混合多旋翼飞行器概览 - 固定翼稳定控制律 已开发了两个附加控制律:1.改进的偏航控制。在传统的多旋翼飞行器上,偏航控制是通过增加沿预期偏航旋转方向相反的发动机转速并同时降低相反发动机转速来产生偏航轴扭矩来实现的,以使飞行器保持恒定的高度。但在大型多旋翼飞行器上,螺旋桨扭矩可能不足,导致控制和响应迟缓。由于拟议的 VTOL 设计的两个后置发动机可以单独倾斜,因此通过稍微向相反方向倾斜发动机可以提高偏航响应能力(图 13)。CATIA 系统模拟表明,±10° 倾斜范围可使偏航率加倍,同时还能提高偏航启动/停止响应能力。

流入转向如何影响风力涡轮机尾流的转向?
摘要。稳定分层流条件通常表现出风向转向,即风向随高度变化。当风力涡轮机经历这种转向流时,产生的尾流结构往往会呈现出拉伸成椭圆形,而不是对称形状或卷曲形状。观察研究表明,尾流转向的幅度小于流入流的转向,而使用执行器盘模型和执行器线模型进行的大涡模拟表明流入流转向和尾流转向之间存在一系列关系。在这里,我们展示了一系列大涡模拟,其中有一系列转向形状、一系列转向幅度、一系列风速和风力涡轮机转子的两个旋转方向,以研究对尾流偏转角的影响。这些结果可以指导尾流转向在稳定分层流中的应用。

国际标准 iso 5775-1
5 安装在钩形胎圈(HB)轮辋上的“带胎圈边缘”轮胎 ............................................................................................................. 12 5.1 概述 ............................................................................................................................................................................. 12 5.2 轮胎名称 ............................................................................................................................................................. 12 5.2.1 概述 ............................................................................................................................................................. 12 5.2.2 轮胎尺寸名称 ............................................................................................................................................. 13 5.2.3 首选旋转方向 ............................................................................................................................................. 13 5.2.4 示例 ............................................................................................................................................................. 13 5.3 轮胎尺寸 ............................................................................................................................................................. 13 5.3.1 概述 ............................................................................................................................................................. 13 5.3.2 “设计轮胎”尺寸 ............................................................................................................................................. 13 5.3.3 计算使用中轮胎的最大尺寸 ...................................................................................................................... 14 5.3.4 确定公称外径代码 ...................................................................................................................................... 14 5.3.5 数值 ...................................................................................................................................................................... 15 5.4 轮胎尺寸测量方法 ............................................................................................................................................. 15 5.5 可安装在钩形轮辋(HB)和直边轮辋上的轮胎 ............................................................................. 15 5.5.1 轮胎名称 ............................................................................................................................................................. 15 5.5.2 使用中轮胎的最大尺寸 ............................................................................................................................. 15

控制多控制 AI
· 易于操作 – 一个控制卡可用于 PROFINET、以太网/IP 和 EtherCat(简单切换总线协议)或 ASi · 为 RollerDrive 提供独立电源 · 更换时即插即用 – 无需寻址或配置 · 所有功能和 I/O 的状态显示均采用 LED · 用于零压力累积输送的集成逻辑,包括初始化 · 使用证书进行安全通信:PROFINET 一致性 B 类、以太网/IP ODVA 一致性、EtherCat 一致性 · 通过 PLC、Web 浏览器菜单和示教方法配置:– RollerDrive 的速度、旋转方向、启动和停止斜坡 – 传感器属性 – 计时器 – 错误处理 – 逻辑(单个/序列释放)· UL 认证 · 通过制动斩波器限制电压 · 可变过程图像用于优化 MultiControl 和 PLC 之间传输的数据量 · 通信线路屏蔽的功能接地 · 电压供应的极性反接保护 · 输入和输出电压供应的短路保护设计
行业碳纳米管的生产方法
看来,纳米级的第一批琴弦是由法国奥尔良大学的Marinobu Endo于1970年编写的。这些细丝的直径为7纳米,并通过蒸汽生长法制备。今天,Tsukuba的NEC实验室的IJIMA名称是1991年成功观察HR-TEM纳米管的第一个人,仍然是该领域的研究人员的首位。同时,旋转电子的自旋可以有两个方向。到目前为止,物理学家认为电子的四个可能状态彼此相等。这四个状态是从两个旋转状态的组合(在向上和向下的方向上)和两个状态获得电子旋转方向。同时,在莫斯科独立地,科学家成功地发现了微管,其长度与直径的比率低于Ijima的发现。俄罗斯人将这种物质命名为Barrelense。Ijima设法观察到的是一种多层纳米管,两年后,他成功地观察了单层纳米管。在1996年,赖斯的小组成功地制作了单层纳米管的并行堆栈,这为进一步研究一维量子物理学开辟了道路。

Xygkou,Anna,Siriaraya,Panote,She,Wan Jou,Covaci,Alexandra和Siang Ang,Chee(2024)“我可以与聊天机器人更加社交吗?我们可以打破基于自旋的电子设备的界限吗?
摘要我们发现,与1 e = 2 µ b b表示读取或擦除自旋数据的最小能量应与1961年Landauer提出的1 E = K B T Ln(2)表示。使用旋转方向代表一些信息的物理学与在基于经典的基于电荷的数据存储中使用粒子的位置的物理学根本不同:前者是量子动力的(独立于居里点以下的温度),而后者是热力学(依赖温度)。定量,与新信息擦除协议相关的这种新能量估计为1。64×10 - 36 J,比Landauer结合(3×10 - 21 J)低15个数量级,无需成本的角动量和总熵增加。在此新信息擦除协议中,无需将电子从电位的一侧移至另一侧,否则用于保留定义旋转状态的能量仍然需要大于现有的热闪光(Landauer Bound)。我们根据包括Rydberg Atom和Spin-Spin相互作用在内的许多实验来验证我们的新能量结合。
行业碳纳米管的生产方法
看来,纳米级的第一批琴弦是由法国奥尔良大学的Marinobu Endo于1970年编写的。这些细丝的直径为7纳米,并通过蒸汽生长法制备。今天,Tsukuba的NEC实验室的IJIMA名称是1991年成功观察HR-TEM纳米管的第一个人,仍然是该领域的研究人员的首位。同时,旋转电子的自旋可以有两个方向。到目前为止,物理学家认为电子的四个可能状态彼此相等。这四个状态是从两个旋转状态的组合(在向上和向下的方向上)和两个状态获得电子旋转方向。同时,在莫斯科独立地,科学家成功地发现了微管,其长度与直径的比率低于Ijima的发现。俄罗斯人将这种物质命名为Barrelense。Ijima设法观察到的是一种多层纳米管,两年后,他成功地观察了单层纳米管。在1996年,赖斯的小组成功地制作了单层纳米管的并行堆栈,这为进一步研究一维量子物理学开辟了道路。
通过纠缠保持更好的时间。
晶格陷阱将ytterbium原子固定在微柯文温度下,以实现纠缠增强的光原子时钟。(p。38)两个原子水平是|g⟩和|e⟩,n两级系统在广义的bloch球上表示为有效的总自旋。BLOCH球体上的顶部中间和顶部分布分别代表独立原子和挤压旋转状态的未进入状态。最终测量的投影噪声,或等效地,Heisenberg的角动量不确定性规则,在总旋转方向上施加了不确定性。使用纠缠原子挤压的自旋状态在相位方向上具有较低的量子噪声,即实现更好的频率分辨率。(左侧第39页)实验设置。(第39页,在右上,根据[7]改编)时钟不确定性(Allan差异)与平均时间,分别使用AS输入状态比较一个时钟,分别是输入状态,分别是未进入的状态(蓝色)和挤压的旋转状态(RED)。纠缠状态优于4.4 dB的标准量子限制。信用:vuletićgroup
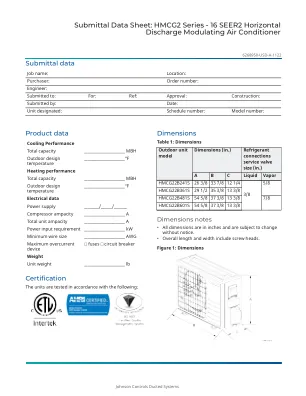
提交数据表:HMCG2 系列 - 16 SEER2 水平排放调节空调
• 360 直流变频驱动技术:采用 360 全直流变频驱动技术,压缩机旋转方向和速度可控制,通过各种运行条件优化能源使用和压缩机稳定性。这可确保最佳空间温度控制,同时提供安静的运行。 • 压力传感器:该装置包含压力传感技术,可在冷却模式下检测低压以保护系统免受损坏。还可以通过从系统吸入压力计算室内盘管温度来实现智能控制。 • 室外机外形更小,安装更灵活:与传统空调相比,这款侧排放室外机可节省约 35% 的空间。它提供墙壁、庭院或屋顶安装的灵活性。 • 稳定的温度控制意味着最佳舒适度:直流逆变器能够在启动时提供全容量以快速冷却,并调整速度以防止温度波动和能量损失。 • 机构列出:经 CSA 认证符合 UL 1995/CSA 22.2 安全认证。性能认证符合 ANSI/AHRI 标准 210/240,符合单元式小型设备认证计划。

非雷神拓扑声子转移独立于设备质量和特殊点环方向
施加拓扑操作,环绕着一个特殊点(EP),使得非常规的单向拓扑声子转移(TPT)严格取决于EP纳入控制循环的方向,并固有地限于实用谐振器的小质量。我们在这里展示了如何通过将拓扑操作与fizeau降落效应结合起来来击败这些局限性并预测无质量的单向TPT,从而拆分了相反的光学模式。当光从纤维的一个选择的一侧(而不是从另一侧)进入时,就会发生一个有效的TPT,导致独特的非重新注射TPT,而与绕EP周围的旋转方向无关。与以前对量子设备质量和质量敏感的先前提案不同,我们的方法几乎不受这些因素的影响。值得注意的是,它的绝热控制循环的阈值持续时间可以轻松缩短最佳TPT,从而产生了前示范中没有对应的顶速完美TPT。这项研究铺平了一条相当大的途径,用于利用深刻不同的手性拓扑效应,而与振动方向和装置质量无关。