XiaoMi-AI文件搜索系统
World File Search System旋转速率
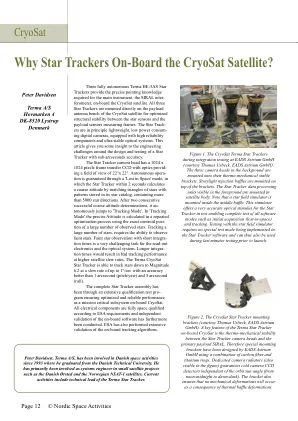
为何 CryoSat 卫星上配备星体追踪器?
1024 像素帧传输 CCD,光学元件提供 22°x 22° 的视野。通过“迷失太空”模式保证自主操作,在该模式下,星体跟踪器在 2 秒内通过将星星的三角形与存储在其星表中的图案进行匹配来计算粗略姿态,其中包含 5000 多个星星方向。连续两次成功确定粗略姿态后,它会自动跳转到“跟踪模式”。在“跟踪模式”下,使用大量观测恒星的精确质心位置,通过重复优化过程计算出精确的姿态。跟踪大量恒星需要能够观察暗淡的恒星。对于读出电子设备和光学系统来说,在短积分时间内观测暗星是一项非常具有挑战性的任务。较长的积分时间会导致卫星旋转速率较高时跟踪性能不佳。Terma CryoSat 星跟踪器能够以高达 1°/秒的旋转速率跟踪低至 6.2 等的恒星,精度优于 1 角秒(俯仰/偏航)和 5 角秒(滚动)。

CONEXUS® 飞机通信装置型号 200
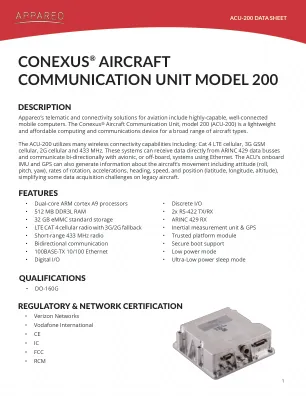
ACU-200 利用多种无线连接功能,包括:Cat 4 LTE 蜂窝、3G GSM 蜂窝、2G 蜂窝和 433 MHz。这些系统可以直接从 ARINC 429 数据总线接收数据,并使用以太网与航空电子或机外系统进行双向通信。ACU 的机载 IMU 和 GPS 还可以生成有关飞机运动的信息,包括姿态(滚转、俯仰、偏航)、旋转速率、加速度、航向、速度和位置(纬度、经度、高度),从而简化了传统飞机上的一些数据采集挑战。
CONEXUS® 飞机通信装置型号 200
ACU-200 利用多种无线连接功能,包括:Cat 4 LTE 蜂窝、3G GSM 蜂窝、2G 蜂窝和 433 MHz。这些系统可以直接从 ARINC 429 数据总线接收数据,并使用以太网与航空电子或机外系统进行双向通信。ACU 的机载 IMU 和 GPS 还可以生成有关飞机运动的信息,包括姿态(滚转、俯仰、偏航)、旋转速率、加速度、航向、速度和位置(纬度、经度、高度),从而简化了传统飞机上的一些数据采集挑战。

切换系统:稳定性分析和控制合成
其中x 1是位置,x 2是速度,a≥0是加速度输入,而q∈{1、2、3、4、5, - 1、0}是齿轮移位位置。当q = - 1时,函数f应为负,并且在q = 0时为a,并且在a中的增加,并且在a中增加,而在q>>>>> 0时,q = a的呈阳性。在此系统中,x 1和x 2是连续状态,q是离散状态。显然,离散的转变影响连续轨迹。在自动传输的情况下,连续状态x 2的演变又用于确定离散过渡。在手动传输的情况下,离散过渡由驾驶员控制。也很自然地考虑取决于连续状态和离散状态的输出变量,例如发动机旋转速率(RPM),该变量是x 2和q的函数。
未来机载 GNSS/INS 混合架构研究
如今,大多数飞机操作都由全球导航卫星系统 (GNSS) 提供支持,该系统还增强了地基增强系统 (GBAS)、星基增强系统 (SBAS) 或机基增强系统 (ABAS)。SBAS 和 GBAS 可以支持精确进近导航操作。但是,这些增强功能确实需要昂贵的参考接收器网络和向机载用户的实时广播。为了克服这一问题,ABAS 系统集成了惯性导航系统 (INS) 提供的机载信息,以提高导航性能。惯性导航基于航位推算原理,影响加速度和角旋转速率测量的微小误差会导致不可忽略的积分漂移,并在导航 1 小时后导致超过 1 Nm 的水平位置误差。
针对喷嘴横截面区域
涡流管,也称为Ranque Vortex Tube,Hilsch Vortex管和Ranque E Hilsch Vortex管,是一种设备,可以通过Intlet Ougzzles向涡流室分隔地进入涡流室,使其可将热和冷空气分开。涡流管是由冶金学家和物理学家Ranque于1933年发现的,而德国物理学家Rudolf Hilsch则改进了设计。一个兰斯式涡流管由一个或多个入口喷嘴,一个涡流室,冷端孔,热端控制阀和管组成。设计的涡流室的特殊内部配置结合了压力和加速空气的效果,达到了高旋转速率(超过百万rpm)(Pinar等,2009)。涡流管根据其流量特征分为两组:反流(图1)和平行流(图2)RHVT。在这项研究中,已经使用了反流RHVT。反流的工作原理Ranque E Hilsch

热塑性技术
• 在此方法中,流体状态(熔融)的聚合物材料在压力下通过封闭的模具填充,并在冷却过程后取出产品。 通过改变条件,它可以用于热塑性塑料、热固性塑料、弹性体和复合材料。 该过程通过使用称为注射机的仪器来执行。 • 该机器由五个单元组成,包括:注射系统、液压系统、模具系统、驱动系统和控制系统。 • 注射系统 >>> 进料斗、料斗和螺杆(或活塞) • 液压系统 >>> 蜗轮旋转,通过推动系统关闭模具,并提供保持模具处于压力下所需的动力 • 模具系统 >>> 包含连接元件和零件、冷却设备、模具空间和注射孔。 • 推动系统 >>> 打开/关闭模具并承载模具的移动元件。 • 控制系统 >>> 控制和调整温度、压力、注射速率、螺杆位置和旋转速率等工艺参数。
多量子化学交换饱和转移核磁共振来量化对称交换:应用于胍基 i 的旋转动力学
摘要:化学交换饱和转移 (CEST) NMR 实验已成为表征蛋白质动力学的有力工具。我们在此表明,CEST 方法可以扩展到具有对称交换的系统,其中所有交换物种的 NMR 信号都会严重加宽。为了实现这一点,引入了多量子 CEST (MQ-CEST),其中将 CEST 脉冲施加到纵向多自旋序密度元素上,并将 CEST 配置文件编码到未加宽的核上。MQ-CEST 方法在蛋白质内精氨酸残基中胍基的受限旋转上得到证明。这些基团及其动力学对于许多酶以及通过形成氢键、盐桥和 π 堆积相互作用进行的非共价相互作用至关重要,并且它们的旋转速率高度表明了形成的相互作用的程度。 MQ-CEST 方法成功应用于 T4 溶菌酶 19 kDa L99A 突变体中的胍基。

自适应控制容错自主载体... - SOAR
本文介绍了自适应控制方法在将自主固定翼飞机回收到航空母舰上的应用。所用的控制结构是模型参考自适应控制,在俯仰、滚转、偏航和空速轴上实施,以提供飞机的 6 个自由度控制。控制系统是为 NAVAIR ExJet 飞机模型开发的。控制器的结构包括一阶线性模型跟随器和自适应批评控制器。自适应用于增强自适应批评控制器产生的命令信号,使用以下方法:自适应偏差校正器、最佳控制修改和局部线性模型补偿。基于状态空间模型的逆控制器生成控制效应器命令。控制系统参考输入是旋转速率和空速,提供外环控制器来引导飞机到达着陆点。控制系统设计是通过使用基于标称误差、时间延迟裕度和着陆精度的指标来实现的。在标称、效应器故障和控制系统建模错误条件下评估控制系统。定义的控制系统能够在标称、故障和建模错误条件下提供所需的控制。