XiaoMi-AI文件搜索系统
World File Search System无人系统

CREX-B - 莱昂纳多 - 无人系统
› 任务控制器 (MCO) 是一个可选的有效载荷操作员站,由配备专有软件的坚固 PC 组成,可连接到 SCCV 以显示相同的遥测和视频。在此站上工作的有效载荷操作员能够执行有效载荷视频处理,而 GCCS 操作员(飞行员)则专注于驾驶 UAS。MCO 还可用于任务规划、地图准备和通用 C4I。
FLIR-Tau2-Brochure.pdf - 无人系统技术
FCC 通知。本设备是设计用于集成到其他产品中以提供热成像功能的子组件。它不是适合消费者使用的最终产品。当集成到主机设备中时,最终产品将生成、使用和辐射可能导致无线电干扰的射频能量。因此,集成此子组件的最终产品必须根据联邦通信委员会 (FCC) 的规定进行测试和批准,然后才能在美国出售或出租、做广告、进口、销售或租赁。FCC 法规旨在提供合理的保护以防止对无线电通信的干扰。参见 47 C.F.R.§§ 2.803 和 15.1 及后续条款。

NOAA 无人系统战略
许多 NOAA 项目率先创新性地使用 UxS 作为宝贵的力量倍增器——通常以更低的成本、更高的安全性和更低的风险来增强数据收集,尤其是在偏远或极端环境中。我们用于开展研究和运营的系统包括无人水下航行器 (UUV),例如滑翔机、遥控航行器 (ROV)、无人水面航行器 (USV) 和无人飞行器 (UAV)。UxS 数据正在改善渔业资源评估、飓风强度预报以及海洋和栖息地测绘。在每个 NOAA 任务区加速和扩大无人系统的使用将为 NOAA 客户提供更高质量、更具成本效益的服务,缩短周期,从而提高运营绩效和安全性。示例应用包括:


无人系统路线图:2007-2032
随着国防部 (DoD) 在未来 25 年(2007 年至 2032 年)开发和使用日益复杂的无人系统部队,技术人员、采购官员和作战规划人员需要制定一个清晰、协调的无人系统技术发展和过渡计划。随着本文件的发布,UAS、UGV 和 UMS(定义为无人水下航行器 (UUV) 和无人水面航行器 (USV))的单独路线图和总体规划已被纳入全面的国防部无人系统路线图中。这份综合无人系统路线图是未来优先考虑和资助这些系统开发和技术的计划,从而确保国防部投资的有效回报。根据战略规划指导 (SPG),其总体目标是指导军事部门和国防机构以逻辑和系统的方式将适用的任务能力迁移到这一新型军事工具上。本路线图重点介绍了各种无人系统在技术和操作上支持的最紧迫的任务需求。在优先考虑未来无人系统技术的研究、开发和采购时,应考虑以下列出的这些需求,以确保国防部的投资获得有效回报。
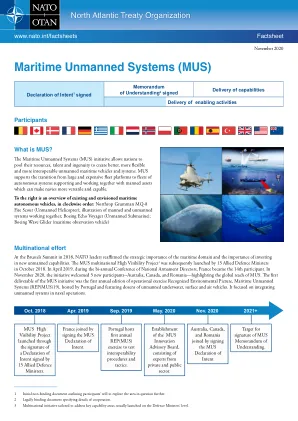
海上无人系统 (MUS)
在 2018 年布鲁塞尔峰会上,北约领导人重申了海洋领域的战略重要性以及投资新无人能力的重要性。随后,13 个盟国国防部长于 2018 年 10 月启动了 MUS 多国高能见度项目 3。2019 年 4 月,在两年一次的国家军备总监会议上,法国成为第 14 个参与者。2020 年 11 月,该计划迎来了 3 个新参与者——澳大利亚、加拿大和罗马尼亚——突显了 MUS 的全球影响力。MUS 计划的第一个成果是第一届年度作战演习“公认环境图、海上无人系统”(REP(MUS)19),由葡萄牙主办,有数十艘无人水下、水面和空中航行器参加。其重点是将无人系统整合到海军行动中。