XiaoMi-AI文件搜索系统
World File Search System无线

APX N便携式无线电常见问题
SmartConnect提供了LMR和LTE/WIFI网络之间的互操作性,类似于我们的其他宽带推销解决方案,但解决方案之间有关键的区别。首先,APX上的SmartConnect自动切换LMR和宽带(LTE或WIFI)之间的按钮功能时,当LMR覆盖范围降至一定阈值以下时,使用户可以专注于任务。此外,SmartConnect是Astro P25系统的真正扩展,而不仅仅是VoIP和P25之间的简单补丁。此解决方案创建了一个Astro系统覆盖/区域,其中P25语音和数据通过宽带传播而不是传统的LMR频率,从而导致宽带操作,听起来像P25,并且保留了大多数P25系统功能。
联邦通信委员会DA 25-128DA 25-125发布:2025年2月11日无线...
简介。在此公开通知中,无线电信局(WTB)和公共安全与国土安全局(PSHSB)(局)(局)为智能运输系统(其)许可证提供了指导,以寻求从专用的短期通信(DSRC)的牢房(DSRC)的操作到蜂窝手术到所有事物(C-v2x) - C-v2x-by everying the Everyther(c-v2xx) (5.895–5.925 GHz)5.850–5.925 GHz(5.9 GHz)频段的一部分,以及寻求首次申请基于C-V2X的实体的指导。该局还恢复了所有路边单位(RSU)许可,该许可自动在2022年7月20日自动终止,因为未能通知委员会在频段的45-megahertz(5.850-5.895 GHz)中停止其运营,并允许在47 cfr§90.3.2(B)上进行47 cfr§90.32(B)。这些规则规定从本公告发行日期起额外的90天,以确认如果他们以前没有提供必要的认证,他们及时停止了乐队下部45-Megahertz部分的所有操作。

无线应用特定协议架构...
Vz@k|x$]5_,UiUdUiUdUdUdUiUiUdUiUdUiUiUdUiUdUdUdUiUiUdUiUdUiUiUdUiUdUiU{UiUiUdUiUdUiUiUdUiUdUiUiU{UiUdUiUdUiUiUdUiUdUiUiUdUdUdUiUdUiUiUdUiUdUiUiUdUiU{UiUdUiUiUdUiUdUiUiUdUiUdUdU

软组织内无线毫动物的永久磁铁驱动导航
创建无线磨刀机器人在人体的软组织内导航以进行医疗应用是一个挑战,因为船上推进和小规模的供电能力有限。在这里,我们提出了大约100个永久磁铁阵列的基于远程驱动的Millirobot系统,该系统使Cyly-Drical Magnity Millirobot能够通过连续渗透在软组织中导航。通过在软组织内部7 t/m的速度上创建一个强烈的磁力陷阱,即使没有主动控制,机器人也会吸引到阵列的中心。通过将阵列与运动阶段和荧光镜面X射线成像系统相结合,磁性机器人在离体猪脑中遵循具有极端弯曲的次数弯曲精度的复杂路径。该系统可以使未来的无线医疗机器人可以提供药物;进行活检,热疗和烧伤;并在身体组织中用小切口刺激神经元。


Logitech G309 Lightspeed无线游戏鼠标? ...
技术规格Lightforce开关混合光学机电开关Lightspeed无线技术最多5个在板载内存配置文件PTFE脚V脚电池寿命 - 电池寿命可能会根据用户和计算条件而变化,并计算恒定运动300+小时,使用Lightspeed无线,600+ 600+具有蓝牙跟踪传感器:英雄25K分辨率:100 –25,25,600 dpi max Maxs。加速度:> 40 g在Logitech G240游戏鼠标垫上最大。速度:>在Logitech G240上进行的400 IP
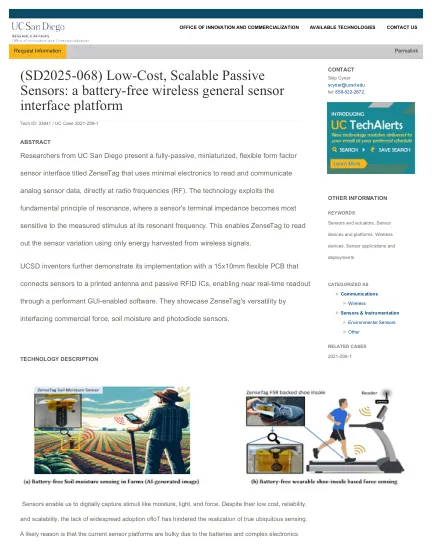
无电池无线通用传感器接口平台
▶Nagarjun Bhat,Agrim Gupta,Ishan Bansal,Harine Govindarajan,Dinesh Bharadia。 div>2024。zensetag:RFID辅助双标签单