机构名称:
¥ 1.0
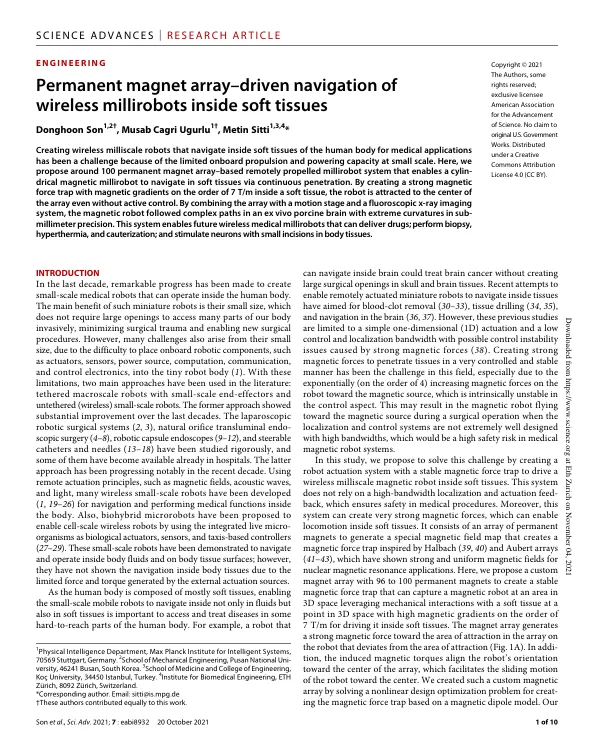
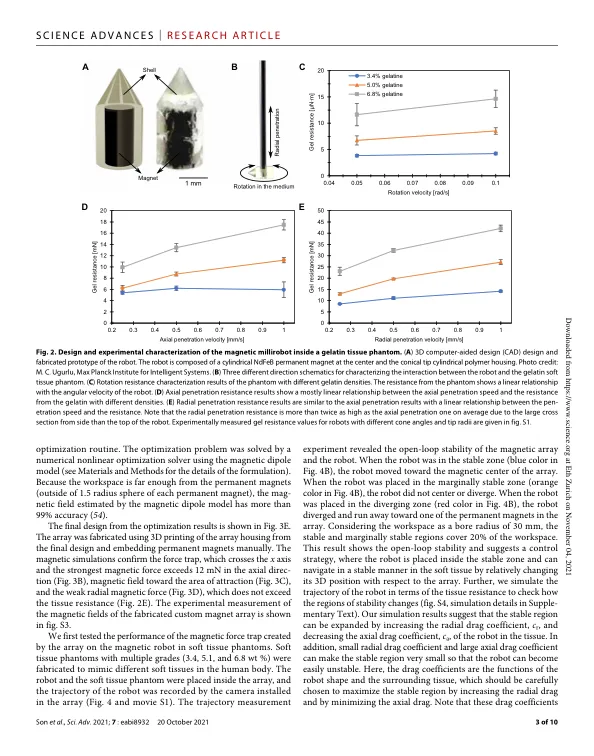
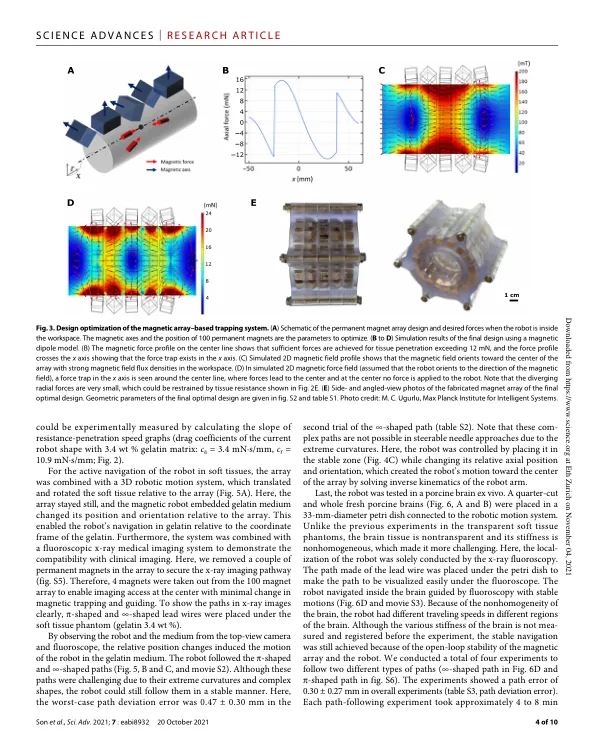
创建无线磨刀机器人在人体的软组织内导航以进行医疗应用是一个挑战,因为船上推进和小规模的供电能力有限。在这里,我们提出了大约100个永久磁铁阵列的基于远程驱动的Millirobot系统,该系统使Cyly-Drical Magnity Millirobot能够通过连续渗透在软组织中导航。通过在软组织内部7 t/m的速度上创建一个强烈的磁力陷阱,即使没有主动控制,机器人也会吸引到阵列的中心。通过将阵列与运动阶段和荧光镜面X射线成像系统相结合,磁性机器人在离体猪脑中遵循具有极端弯曲的次数弯曲精度的复杂路径。该系统可以使未来的无线医疗机器人可以提供药物;进行活检,热疗和烧伤;并在身体组织中用小切口刺激神经元。
软组织内无线毫动物的永久磁铁驱动导航
主要关键词

相关文件推荐