XiaoMi-AI文件搜索系统
World File Search System时间常数

3.1控制系统
3.1控制系统l T P 5-2理由是学生知道过程行业中各种植物控制的先决条件。自动控制系统可节省人力,降低生产成本,提高成品的准确性,并有助于大规模生产,以便要求该主题的知识更深入地掌握控制环境/技术,因为需要在主题中研究。过程控制,过程仪器。详细内容1。Introduction (20 hrs) Basic elements of control system, open loop control system, closed loop control system, control system terminology, manually controlled closed loop systems, automatic controlled closed loop systems, basic elements of a servo mechanism, Examples of automatic control systems, use of equivalent systems for system analysis, linear systems, non-linear systems, control system examples from chemical systems, mechanical systems, electrical systems, introduction to laplace transform.2。AC和DC伺服电机同步器,Steppermotor,Amplyede的传递函数分析。交流位置控制系统,磁性放大器。(14小时)3。控制系统表示(16小时)传输函数,框图,减少框图,框图上的问题,梅森的公式信号流程图4。时间响应分析(16小时)标准测试信号,一阶系统和二阶系统的时间响应,时间常数,二阶系统的时间响应,时间响应规范,稳态错误和错误常数,第一阶和二阶系统中的问题。5。稳定性(14小时)Routh Hurwitz标准,根源基因座,使用半日志图纸绘图

用CCAT的宇宙学和天体物理学的微波谐振器
2微波动力电感检测器18 2.1导体和复杂导电率。。。。。。。。。。。。。。。。19 2.2超导性。。。。。。。。。。。。。。。。。。。。。。。。。。。。20 2.2.1基本现象学:库珀对和准粒子。。。21 2.2.2准颗粒生成和重组。。。。。。。。。24 2.2.3穿透深度和薄膜。。。。。。。。。。。。。。。30 2.2.4复杂的电导率:Mattis-Bardeen理论。。。。。。31 2.3微波谐振器和S-参数。。。。。。。。。。。。。。。37 2.3.1预序:微波网络和S-参数。。。37 2.3.2共振电路和质量因素。。。。。。。。。。。。。38 2.4动力电感探测器的原理。。。。。。。。。。。。。。43 2.4.1 MKID的表面阻抗。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 43 2.4.2响应性。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 44 2.4.3非线性和分叉。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 53 2.5灵敏度和噪声。 。 。 。 。 。 。 。 。 。 。 。 。 。 。 。43 2.4.1 MKID的表面阻抗。。。。。。。。。。。。。。。。。43 2.4.2响应性。。。。。。。。。。。。。。。。。。。。。。。。。。44 2.4.3非线性和分叉。。。。。。。。。。。。。。。。。。53 2.5灵敏度和噪声。。。。。。。。。。。。。。。。。。。。。。。。。。。56 2.5.1背景。。。。。。。。。。。。。。。。。。。。。。。。。。。57 2.5.2时间常数。。。。。。。。。。。。。。。。。。。。。。。。。59 2.5.3光子噪声。。。。。。。。。。。。。。。。。。。。。。。。。。61 2.5.4生成重组噪声。。。。。。。。。。。。。。62 2.5.5 tls噪声。。。。。。。。。。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>63 2.6.6总NEP。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 。 div> 64 div>63 2.6.6总NEP。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>。 div>64 div>

细胞内选择性5-羟色胺再摄取抑制剂
选择性5-羟色胺再摄取抑制剂(SSRIS)是针对患有重大疾病的个体的最常见的治疗方法。在SSRI结合5-羟色胺转运蛋白(SERT)之前或之后发生的治疗机制的理解很少,部分是因为在活细胞中SSRI的细胞和亚细胞药物性特性上不存在研究。我们使用针对质膜,细胞质或内质网(ER)的新的基于基于强度的药物感应荧光记者(ER)研究了依此所和氟西汀。我们还使用了细胞和磷脂膜内药物的化学检测。这些药物在神经元细胞质中达到平衡,并且ER的浓度与外部施加溶液的浓度大致相同,其中几个S(依然瓜)或200 - 300 s(氟西汀)的时间常数。同时,这些药物在脂质膜中积聚18倍(依然拉列型)或180倍(氟西汀),可能是由于更大的因素。两种药物都会在冲洗过程中迅速离开细胞质,管腔和膜。我们合成了两个SSRI的膜 - 覆盖季胺衍生物。基本衍生物在膜,细胞质和ER中大大排除。2.4 h。它们比SSRI(分别为依他丙啶或氟西汀衍生物)抑制SERT转运电流的六倍或11倍,可提供有用的有用的探针,以区分分室化的SSRI效应。2.4 h。它们比SSRI(分别为依他丙啶或氟西汀衍生物)抑制SERT转运电流的六倍或11倍,可提供有用的有用的探针,以区分分室化的SSRI效应。尽管我们的测量值比SSRI的治疗滞后滞后速度快,但这些数据表明,在治疗效应或抗抑郁药中断综合征中,细胞器或膜内的SSRI - SERT相互作用可能起着作用。

通过激光脉冲和衰变的相应驱动实现量子相干性
其中 T 是时间排序算子。虽然 U(t2,t1) 的显式计算极其困难,但显然时间相关哈密顿量引起的动力学将 t1 时的量子态双射映射到 t2 时的量子态,并保持相互的标量积。因此,如果系统最初处于高熵 S>0 的混合态,它将永远保持混合态,且熵完全相同。即使对 H(t) 在时间上的完全理想控制,也无法以这种方式产生相干性。因此,必须考虑开放系统。生成单一状态的标准方法是使感兴趣的系统与冷系统进行热接触。一般来说,这是一个极其缓慢的过程。目标量子态必须是某个给定系统的基态。另外,一般的光泵浦和特别是激光冷却 [1] 都是利用共振泵浦和自发衰变来降低微观系统熵的成熟技术。最近,工程耗散已被认为是在小型 [2-4] 和扩展系统 [5,6] 中产生目标纠缠量子态的一种手段。实验上,已经证明了两个量子比特 [7,8] 和两个捕获的中观铯云 [9] 存在纠缠。在本文中,我们表明,如果涉及中间、高度激发和衰减态,周期性驱动可以使量子系统收敛到相干量子态。关键方面是泵浦脉冲周期与内部过程的时间常数(这里是拉莫尔进动)的可比性。这将我们的提议与已建立的光泵浦协议区分开来。完全无序的初始混合物可以变得几乎相干。最终混合物的熵仅为 S ≈ kB ln2,对应于两种状态的混合。一个吸引人的优点是,一旦关闭驱动,林德布拉衰变就不再重要,系统仅受哈密顿动力学支配。本研究的重点是通过示范性方式展示在周期性激光脉冲作用下小自旋系统中熵的大幅降低。选择该系统的动机是量子点中电子自旋与核自旋相互作用的实验[10-17]。所研究的模型也适用于分子自由基中的电子自旋[18]或分子磁体,见参考文献[19-21]。在有机分子中,自旋浴由有机配体中氢原子核的核自旋决定。
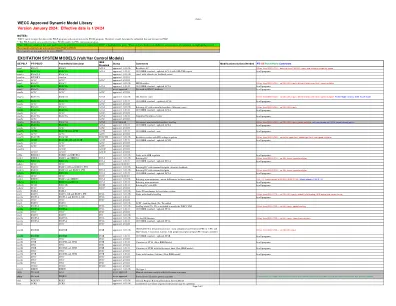
WECC 认可的动态模型库
esac3a ESAC3A ESAC3A AC3A 已批准 1/21/11 2005 IEEE 标准 - 更新 AC3A 在所有程序中 esac3c AC3C AC3C AC3C 已批准 4/22/20 exac4 EXAC4 EXAC4 AC4A 已批准 8/11/06 带可控整流器的旋转交流电 (Althyrex) (罕见) 与 IEEE AC4A 不同 - 没有 OEL/UEL 输入 esac4a ESAC4A ESAC4A AC4A 已批准 1/21/11 2005 IEEE 标准 - 更新 AC4A 在所有程序中 esac4c AC4C AC4C AC4C 已批准 4/22/20 esac5a ESAC5A ESAC5A AC5A 已批准 1/21/11 简化无刷励磁机 在所有程序中 esac5c AC5C AC5C 已批准 4/22/20 exac6a ESAC6A EXAC6A AC6A 从未批准 交流发电机,非控制整流器,超前滞后 与 IEEE AC6A 不同 - 没有 OEL/UEL 输入;速度乘法器,不是 PSS/E 的新模型(模型已经存在) esac6a ESAC6A ESAC6A AC6A 批准 1/21/11 2005 IEEE 标准 - 更新的 AC6A 在所有程序中 esac6c AC6C AC6C AC6C 批准 4/22/20 esac7b AC7B ESAC7B 和 AC7B AC7B 批准 1/21/11 2005 IEEE 标准 - 新 在所有程序中 esac7c AC7C AC7C AC7C 批准 4/22/20 exac8b ESAC8B EXAC8B ESAC8B 批准 8/11/06 带 PID 电压调节器的无刷励磁机 与 IEEE AC8B 不同 - 没有励磁机上限;增加了输入限制和速度乘数 esac8b AC8B ESAC8B_GE 和 AC8B AC8B 已批准 1/21/11 2005 IEEE 标准 - 更新了 AC8B 在所有程序中 esac8c AC8C AC8C AC8C 已批准 4/22/20 esac9c AC9C AC9C AC9C 已批准 4/22/20 esac10c AC10C AC10C 已批准 4/22/20 AC11C AC11C AC11C 已批准 4/22/20 exbbc BBSEX1 EXBBC 和 BBSEX1 已批准 8/11/06 静态带 ABB 调节器 在所有程序中 exdc1 IEEEX1 EXDC1 和 IEEEX1 DC1A 已批准 8/11/06 旋转直流 与 IEEE DC1A 不同 - 没有 UEL 输入;速度倍增器 esdc1a ESDC1A ESDC1A DC1A 已批准 1/21/11 2005 IEEE 标准 - 更新了 DC1A 在所有程序中 esdc1c DC1C DC1C DC1C 已批准 4/22/20 exdc2 EXDC2 EXDC2_GE 和 EXDC2_PTI 已批准 8/11/06 带有终端供电先导的旋转直流电、交替反馈 exdc2a EXDC2 EXDC2A 和 EXDC2_PTI DC2A 已批准 8/11/06 带有终端供电先导的旋转直流电 与 IEEE DC2A 不同 - 没有 UEL 输入;速度倍增器 esdc2a ESDC2A ESDC2A DC2A 已批准 2005 年 1 月 21 日 IEEE 标准 - 在所有程序中更新了 DC2A esdc2c DC2C DC2C DC2C 已批准 20 年 4 月 22 日 exdc4 IEEET4 EXDC4 和 IEEET4 DC3A 已批准 2006 年 8 月 11 日 旋转、非连续 - 模型间细微差别 如果 Kr = 0,应转换为 IEEEX4 (IEEE DC3A)。在 PSS/E -32 中添加了模型。 esdc3a DC3A ESDC3A 和 DC3A DC3A 已批准 1/21/11 旋转,非连续 在所有程序中 esdc4b DC4B ESDC4B DC4B 已批准 1/21/11 带 PID 的旋转直流 在所有程序中 esdc4c DC4C DC4C DC4C 已批准 4/22/20 exeli EXELI EXELI 已批准 8/11/06 静态 PI 变压器供电励磁系统 exst1 EXST1 EXST1_GE 和 EXST1_PTI ST1A 已批准 8/11/06 静态双超前/滞后 与 IEEE ST1A 不同 - 没有 OEL/UEL 输入;添加了 Xe Ifd 负载;RFB 在励磁电流限制器之前。esst1a ESST1A ESST1A 和 ESST1A_GE ST1A 已批准 1/21/11 在所有程序中 esst1c ST1C ST1C ST1C 已批准 4/22/20 exst2 EXST2 EXST2 已批准 8/11/06 SCPT - 添加了超前/滞后块(Tc、Tb) exst2a ESST2A EXST2A ST2A 已批准 8/11/06 包含超前/滞后块(Tc、Tb)以匹配 WECC FM 与 IEEE ST2A 不同 - 没有 UEL 输入;添加了超前/滞后。 esst2a ESST2A ESST2A ST2A 已批准 2005 年 1 月 21 日 IEEE 标准 - 更新的 ST2A esst2c ST2C ST2C ST2C 已批准 20 年 4 月 22 日 exst3 EXST3 EXST3 ST3 已批准 2006 年 8 月 11 日 exst3a ESST3A EXST3A ST3A 已批准 2006 年 8 月 11 日 用于 GE Generex 与 IEEE ST2A 不同 - 没有 UEL 输入;时间常数较少。esst3a ESST3A ESST3A ST3A 已批准 2005 年 1 月 21 日 IEEE 标准 - 更新的 ST3A esst3c ST3C ST3C 已批准 20 年 4 月 22 日