XiaoMi-AI文件搜索系统
World File Search System月球表面
论文标题 [字体
月船一号于 2008 年 10 月 22 日从斯里哈里科塔的 Satish Dhawan 航天中心发射升空。它使用了本土研制的极地卫星运载火箭 (PSLV-XL)。该航天器于 2008 年 11 月 8 日成功进入月球轨道,仅在六天后就释放了月球撞击探测器。同一天,由于恒星跟踪传感器故障,月球撞击探测器在沙克尔顿陨石坑附近坠毁。撞击探测器坠毁时,人们可以分析月球地下土壤中是否有冰的痕迹。月船一号在距月球表面仅 100 公里的地方盘旋,拍摄了大量月球地形的高分辨率图像。它还进行了矿物测绘,并搜寻了月球表面是否有放射性元素。该任务的主要成就之一是发现月球土壤中存在大量水分子。该任务仅花费了 5600 万美元,为我们提供了有关月球表面的重要信息。它还在月球南极发现水冰,可用于饮用和其他用途。
我们将于2024财年开始开发创新型太空无人建造技术。
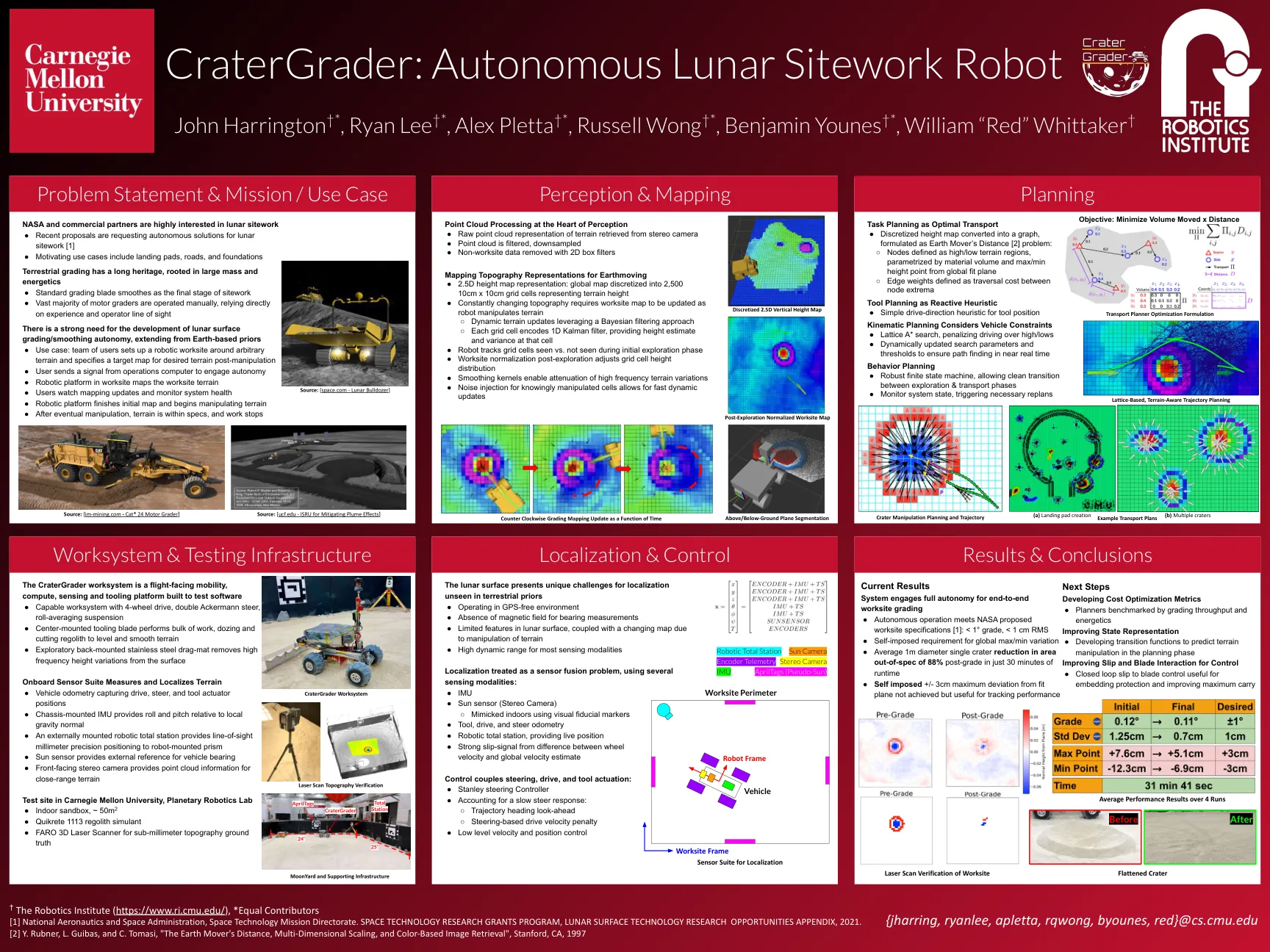
[实施图像] 为了控制工程机械实现无人施工,必须获取机械的准确位置信息。为了在没有定位卫星系统的月球环境下获取位置信息,我们旨在通过整合利用环境信息的LiDAR-SLAM技术和利用人工特征的地标SLAM技术(混合SLAM),开发能够适应月球表面等特殊环境的自动驾驶技术。
2(NextSTEP-2)综合广泛机构公告(...
美国宇航局的使命是探索空中和太空中的未知世界,为人类利益而创新,并通过发现激励世界。这项使命的关键是通过人类对月球、火星及更远地方的探索来扩大人类的影响力。正如《月球到火星战略和目标》中所述,我们探索的“原因”包括三个支柱:科学、灵感和国家姿态。要确保在这三个领域取得成功,需要一种架构方法,该方法结合了创新、协作和伙伴关系,并可以在数十年的努力中持续下去。为了实现这一目标,美国宇航局开发了一种创新方法来定义美国宇航局的月球到火星载人探索架构,从目标(从右边)进行架构设计,以确保开发的架构满足机构目标。在完善月球到火星架构的过程中,在阿尔特弥斯月球架构中发现了两个缺陷,即运输和交付月球表面物流和月球表面无人移动系统,这些都是实现拟议的月球探索活动所必需的。
太空机器人月球着陆器
Astrobotic 的着陆器可以将有效载荷送至月球轨道和月球表面。虽然轨道会因任务不同而变化,但 Peregrine 和 Griffin 通常保持在三个不同的月球轨道 (LO) 中,其中两个可用于部署有效载荷。近地点始终为 100 公里,而远地点则通过月球轨道插入 (LOI) 机动从 8700 公里减小到 100 公里的圆形轨道。轨道倾角通常由表面着陆点决定。

NASA 卫星服务和 OSAM-1 任务
和系留 FF) - 外部遮光器(Starshades) - 外部光学 FF(高能成像)太阳物理学 - 外部遮光器(太阳)和外部光学 - 月球表面仪器名义商业平台 - 探索/旅游(如商业 LEO 目的地) - 物流/仓库(如 SpaceX Starship) - 检查(如 InsureSat) - 远程观察(如 ISS Bartolomeo) - 通信(如 SPIDER) - EOL 处置(如 AstroScale) - 寿命延长(如 MEV、MRV) - 加油(如 OrbitFab) - …
CraterGrader - MRSD 项目 - 卡内基梅隆大学
† 机器人研究所 (https://www.ri.cmu.edu/),* 同等贡献者 [1] 美国国家航空航天局,空间技术任务理事会。空间技术研究资助计划,月球表面技术研究机会附录,2021 年。[2] Y. Rubner、L. Guibas 和 C. Tomasi,“地球移动者的距离、多维缩放和基于颜色的图像检索”,斯坦福,加利福尼亚州,1997 年 {jharring、ryanlee、apletta、rqwong、byounes、red}@cs.cmu.edu



Prospect Moon:Interlune的商业任务到月面。 E. A. Frank 1,1 Interlune,西雅图,华盛顿州98108,美国。 (efrank@interlune.space)。
向NASA的建议:Interlune认可了月球表面数据的珍贵性,并愿意与行星科学界共享我们的数据。我们首选的机制是通过类似于地球科学部门计划元素商业SmallSat数据获取的玫瑰计划元素。该计划是为了识别,评估和获取支持NASA地球科学研究和应用目标的商业来源的数据。这些数据提供了一种具有成本效益的方式,可以补充NASA或其他政府机构获得的地球观察套件。

软物质表征功能的最新进展...
在1991年,著名的法国科学家皮埃尔·吉尔斯·德·基因斯(Pierre-Gilles de Genes)因其在软物质(尤其是聚合物)上有影响力的研究而获得诺贝尔奖。他被定义为软物质的创始父亲。在他的诺贝尔演讲(https://www.nobelprize.org/uploads/2018/06/gennes-lecter.pdf)中,他将软物质又称复杂的液体描述为具有两个主要特征的材料 - (a)复杂性和(b)灵活性。软物质的子类别(例如 - 颗粒材料,聚合物,泡沫,胶体等)是根据Pierre-Gilles de Gennes的定义定义的。在NASA GRC,我们正在推动月球表面软物质基础研究的边界。关于月球表面科学,我们专注于开发与颗粒材料和生物柔软/活跃物质有关的能力,以促进ISRU和Bio-ISRU能力的未来努力。为了在月球环境的局限性下实现软物质研究的基本目标,科学能力必须是小型,灵活,模块化,货架上的,而重点需要更多地是发展跨学科能力,以利用AI/ML和计算机愿景的最新增长,以增强我们对我们对基本科学的理解。此策略将使我们能够在发射,安装和占用Lunar Surface