XiaoMi-AI文件搜索系统
World File Search System有效训练

成为空中和太空部队的预备役军人
隶属于克雷伊空军基地 110 的塔维尼空军分队为国防和国家安全白皮书的主要战略职能做出了贡献。因此,它是一个反应式战斗工具。它永久地向驻扎在其所在地的部队提供支持,以便他们有效训练并能够立即响应共和国总统通过作战指挥发出的命令。

113 52 圣迪济耶空军基地
113空军基地是一种强大且反应灵敏的作战工具。它为部队提供持续支持,以便他们进行有效训练,并能立即响应共和国总统通过作战指挥所下达的命令。对于空军来说,113空军基地对《国防和国家安全白皮书》五大战略功能中的三项做出了重大贡献:威慑、保护和立即干预。


COMP3065 人工智能应用开发 (3,2,2)
编号 课程预期学习成果(CILO) 知识 1 描述人工智能应用的各种机器学习算法 2 描述人工智能应用程序的开发生命周期 3 解释人工智能在物联网应用的原理 专业技能 4 从互联网收集数据并执行数据预处理 5 为人工智能应用确定合适的机器学习模型 6 开发软件程序以有效训练人工智能应用的机器学习模型 7 为人工智能应用部署训练好的机器学习模型 日历 描述:本课程旨在让学生掌握使用最新软件开发工具和云平台设计和开发人工智能应用程序的知识和技能。学生将通过小组项目完成整个人工智能应用程序开发周期。 教学和学习活动(TLA):

小型E:小语言模型具有线性注意的高效语音综合
由语言模型提供支持的文本到语音(TTS)的最新进步已在实现自然性和零发音克隆方面表现出了显着的功能。值得注意的是,仅解码器的变压器是该域中的突出体系结构。然而,变形金刚面临着依赖于二次复杂性的挑战,在冗长的序列和资源约束的硬件上阻碍了训练。此外,对于TTS比对的单调性质,它们缺乏特定的感应偏见。作为回应,我们建议用重复的架构替换变压器,并引入专门的交叉注意机制,以减少重复和跳过问题。因此,我们的体系结构可以在长样本上有效训练,并实现最先进的零镜头语音克隆,以相对于可比大小的基线。我们的实现和演示可在https:// github.com/theodorblackbird/lina-speech上找到。索引术语:语音综合,零射击自适应文本到语音,语言建模,线性注意1。简介

机器人运动学习的Riemannian流量匹配政策
摘要 - 我们引入了Riemannian流匹配策略(RFMP),这是一种用于学习和合成机器人视觉策略的新型模型。RFMP利用流量匹配方法的有效训练和推理能力。通过设计,RFMP继承了流量匹配的优势:编码高维多模式分布的能力,通常在机器人任务中遇到,以及非常简单且快速的推理过程。我们证明了RFMP对状态和视觉条件的机器人运动策略的适用性。值得注意的是,正如机器人状态位于里曼尼亚歧管上一样,RFMP固有地包含了几何意识,这对于逼真的机器人任务至关重要。为了评估RFMP,我们进行了两个概念验证实验,将其性能与扩散策略进行了比较。尽管两种方法都成功 - 完全学习了所考虑的任务,但我们的结果表明,RFMP提供了更平稳的推理时间的动作轨迹。
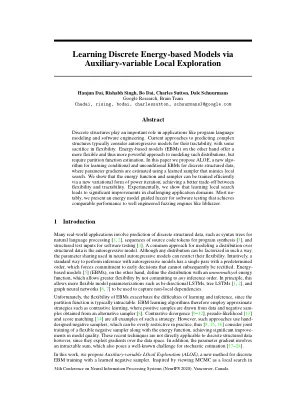
通过辅助变量的本地探索学习基于离散能量的模型
离散结构在程序语言建模和软件工程等应用中起着重要作用。当前预测复杂结构的方法通常会以某些牺牲性不可思议的方式考虑自回归模型的障碍。基于能量的模型(EBM)为建模这种分布提供了一种更加灵活,更强大的方法,但需要分区函数估计。在本文中,我们提出了芦荟,这是一种用于学习条件和无条件eBM的新算法,用于离散结构化数据,其中使用学习的采样器来估算参数梯度,以模拟本地搜索。我们表明,能量函数和采样器可以通过新的变化形式的功率迭代形式进行有效训练,从而在灵活性和障碍性之间实现了更好的权衡。在实验上,我们表明学习本地搜索会导致具有挑战性的应用程序领域的显着改善。最重要的是,我们提出了一种用于软件测试的能量模型指导的绒毛,该模型与Libfuzzer(如Libfuzzer)具有可比性的性能。

开发基于精细语言模型的瑞典法律判断的语义搜索工具
大型语言模型(LLMS)是非常大的深度学习模型,可根据大量数据进行重新训练。是句子的双向编码器表示,来自变形金刚(SBERT)的句子是基于变压器的DeNoising AutoCoder(TSDAE),生成查询网络(GENQ)和生成假伪标记(GPL)的改编。本论文项目旨在为瑞典法律判断开发语义搜索工具,以克服法律文件检索中传统关键字搜索的局限性。为此,使用高级培训方法(例如TSDAE,GENQ和GPL的改编),通过利用自然语言处理(NLP)(NLP)(NLP)(NLP)和精细的LLM来开发一种善于理解法律语言的语义细微差别的模型。要从未标记的数据中生成标记的数据,对其进行微调后使用了GPT3.5模型。使用生成模型的使用标记数据的生成对于该项目有效训练Sbert至关重要。已经评估了搜索工具。评估表明,搜索工具可以根据语义查询准确检索相关文档,并同样提高法律研究的效率和准确性。genq已被证明是此用例的最有效的训练方法。

Unity RL操场:多功能增强学习...
导入机器人URDF(United Robotics描述格式)文件,对于设置机器人模型必不可少。自动配置模块简化了配置RL参数和设置的过程,以确保为导入的机器人模型正确设置训练和仿真模块。该模块均馈入RL训练模块(支持PPO和SAC等算法)和仿真模块(由Physx提供支持),从而可以进行机器人模型的有效训练和物理模拟。SIM2REAL模块可以通过以太网将电动机命令发送到真实的机器人以进行现实世界实现,从而有助于确保可以轻松地将训练有素的策略部署在物理机器人中。此外,我们开发了一种状态对齐工具,该工具可以实时比较实际机器人和仿真模型之间的状态,从而促进了真实机器人状态与模拟中的模拟态度的一致性,以迅速迁移受过训练的行为。在线学习模块代表了一项新颖的努力,结合了SIM2REAL通信和RL训练模块,以利用现实世界中的机器人运动数据进行培训,从而克服了Sim2real的差异。

iotFlowGenerator:制作综合物联网设备的交通流动流量
多年来,Honeypots成为了解攻击者意图并欺骗攻击者花时间和资源的重要安全工具。最近,正在为物联网(IoT)设备的蜜罐诱使攻击者并学习其行为。但是,大多数现有的物联网蜜饯,甚至是高相互作用的物联网,攻击者很容易检测到,由于缺乏来自蜜罐的真实网络流量,因此可以观察到蜜罐流量。这意味着,要建立更好的蜜罐并增强网络启示功能,物联网蜜饯需要产生逼真的网络流量。为了实现这一目标,我们提出了一种基于深度学习的新方法,用于产生流量,以模仿用户和物联网设备交互所致的真实网络流量。我们的方法克服的一个关键技术挑战是缺乏特定于设备的物联网流量数据来有效训练属性。我们通过利用序列的核心生成对抗学习算法以及物联网设备常见的主要特定知识来应对这一挑战。通过使用18个IoT设备进行广泛的实验评估,我们证明了所提出的合成IoT产生工具的表现明显优于最先进的序列和数据包生成器的状态,即使与自适应攻击者也无法区分。