XiaoMi-AI文件搜索系统
World File Search System机电式
604B 机电一体化试题库
(6)一条厚 7 毫米、宽 95 毫米的平带在两个以 1500 rpm/min 的速度运转的带轮之间传递动力。皮带的质量为 0.85kg/m 长,小带轮的搭接角为 155,皮带和带轮之间的摩擦系数为 025。如果皮带中的最大允许应力为 2MN/m^2,求皮带中传递的最大功率和初始张力。
机电一体化工程硕士课程
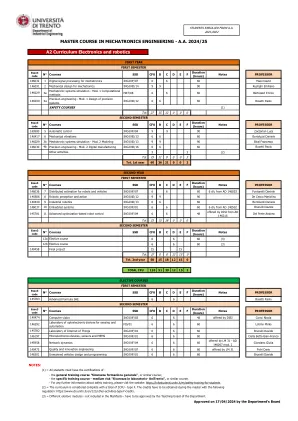
- 一般培训课程“ Sicurezza formazione Generale”或类似课程; - 特定的培训课程 - 中等风险“实验室中的Sicurezza”或类似课程; - 有关安全培训的任何更多信息,请访问网站:https://infostudenti.unitn.it/en/safety-training-for-students
浸没式液冷系统氟化液冷凝散热与沸腾换热匹配研究 - 制冷学报
的增加而降低 , 当冷却水流量增至恰好实现热量匹配流量的 1.5、2.7、3.8 倍时 ,COP 分别下降 39.0%、60.1%、69.2%。

机电一体化系统设计,SI 版本
限制,某些第三方内容可能会被隐藏。编辑审查认为任何被隐藏的内容不会对整体学习体验产生实质性影响。如果后续权利限制要求,出版商保留随时从此标题中删除内容的权利。有关定价、先前版本、当前版本更改和替代格式的宝贵信息,请访问 www.cengage.com/highered 通过 ISBN#、作者、标题或关键字搜索您感兴趣领域的材料。
固态电源控制器与机电开关
除了基本的 ON/OFF 电源切换之外,典型的 SSPC 还提供许多保护功能,包括快速短路保护,使电路停用时间达到 1 mS 左右。电路停用涉及在 500 µS 至 1mS 的时间内逐渐移除通道的开关 MOSFET 栅极驱动,以最大限度地减少 EMI 辐射。参考图 1,对于过载保护,SSPC 实施“I 平方 t”(I 2 t)检测方法来保护电线和负载,同时仍可防止高浪涌电流切换到电机、螺线管、电容负载(如电子电源)或白炽灯泡负载,从而导致“误跳闸”。借助 I 2 t 保护,当测量的负载电流为额定电流的十倍或更多时,SSPC 将立即跳闸。对于较低的电流值,SSPC 的处理器会执行连续计算,从而导致在负载电流为额定值一至十倍的过载情况下跳闸时间更长。

智能系统与机电一体化工程
课堂之外的机会。我们的学生享受着活跃而多样的课外体验,拥有 100 多个学生俱乐部和 30 多个运动队。BSISME 学生通常会加入 IEEE 学生分会、美国机械工程师学会、IEEE 机器人与自动化学会学生分会、IEEE Eta Kappa Nu 荣誉学会、Pi Tau Sigma 学会、女性工程师协会和工程产品设计与创新学会等组织。其他受欢迎的活动包括 IEEE 学生日、无人机设计学院、无人机驾驶学院和相扑机器人比赛。我们的学生还喜欢出国实地考察并与美国备受推崇的大学进行交流。
机电一体化与自动化技术学士
142 CFOC209M 污染场地环境修复在线课程 1.0 0 0 0 0 3.0 报告日期:2024 年 6 月 13 日下午 2:30:46 第 7 页,共 19 页

机电一体化工程的科学与教育
N Hewit 在 [3] 中指出:对机电一体化的精确定义是不可能的,也不是特别可取的,因为这是一个新兴领域,而且发展迅速;过于严格的定义会限制和约束,而这正是目前所不想要的。机电一体化作为一门跨学科学科,往往会吸引所有相关领域的贡献,而没有真正提出由于跨学科互动而产生的机遇和挑战。一个例子是,许多机电一体化会议没有重点,因此没有吸引到最足够的贡献,而这些贡献肯定存在。这是一个缺点,因为它阻碍了机电一体化作为一门工程科学的发展。机电一体化方面的科学出版物仍然很少,有助于使该学科更加集中。较早的出版物之一是《机电一体化》——由 Elsevier Science 出版的国际期刊,于 1991 年首次出版。
BTech-机电一体化_-第二年_22-23.pdf
课程内容: 单元 1:拉普拉斯变换 [09 小时] 定义 – 存在条件;基本函数的变换;拉普拉斯变换的性质 – 线性性质、一阶移位性质、二阶移位性质、函数乘以 tn 的变换、尺度变化性质、函数除以 t 的变换、函数积分的变换、导数的变换;利用拉普拉斯变换求积分;一些特殊函数的变换 – 周期函数、海维赛德单位阶跃函数、狄拉克函数。 单元 2:逆拉普拉斯变换 [09 小时] 简介;一些基本函数的逆变换;求逆变换的一般方法;求逆拉普拉斯变换的部分分式法和卷积定理;用于求常系数线性微分方程和联立线性微分方程的解的应用 单元 3:傅里叶变换 [09 小时] 定义 – 积分变换;傅里叶积分定理(无证明);傅里叶正弦和余弦积分;傅里叶积分的复数形式;傅里叶正弦和余弦变换;傅里叶变换的性质;傅里叶变换的帕塞瓦尔恒等式。 第四单元:偏微分方程及其应用 [09 小时] 通过消除任意常数和函数形成偏微分方程;可通过直接积分解的方程;一阶线性方程(拉格朗日线性方程);变量分离法 - 用于寻找一维热流方程的解
机电一体化垃圾收集处理系统
计算机科学硕士学位 纳姆迪·阿齐基韦大学,阿乌卡,阿乌卡 摘要:人工智能和机器人驱动的垃圾收集系统是智慧城市的必要条件。由于缺乏技术进步和人口不断增长,传统的垃圾收集系统基本上是无效的,而拟议的系统在垃圾收集和处理方面提供了更高的效率和及时性,减少了垃圾箱溢出的漏洞。垃圾箱基于机电一体化的概念,它配备了传感器和机器人控制系统,能够检测垃圾箱的状态,并在垃圾箱装满时自动将其移动到处理中心。机电一体化垃圾箱由移动轮组成,使垃圾箱能够在崎岖不平的道路和地形上移动,每个轮子都有一个直流电机、数字伺服器、遥控发射器、一个传感器摄像头、一个 PCB 和一个 Arduino 超级板。传感器监控垃圾箱并向控制器发出警报信号。如果垃圾箱已装满,它会自动盖上,并在直流电机的帮助下移动到附近的垃圾场。