XiaoMi-AI文件搜索系统
World File Search System机群系统

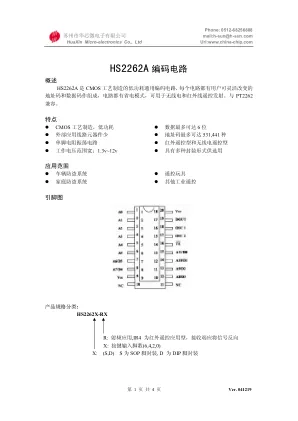
HS2262A 编码电路
z 数据最多可达 6 位 z 地址码最多可达 531,441 种 z 红外遥控型和无线电遥控型 z 具有多种封装形式供选用 应用范围 z 车辆防盗系统 z 家庭防盗系统 z 遥控玩具 z 其他工业遥控 引脚图 产品规格分类 : HS2262X-RX R: 射频应用 ,IR4 为红外遥控应用型,接收端应将信号反向 X: 按键输入脚数 (6,4,2,0) X: (S,D) S 为 SOP 脚封装 , D 为 DIP 脚封装
改变明天
• Automated Meter Reading (AMR) 自动抄表( AMR ) • Security Control Device 安全控制装置 • Electronic Door Access System 电子门禁系统 • Electronic Toll Charging device 电子收费设备 • Building automation 楼宇自动化 • Aircon damper controller 空调风门控制器 • Smart Card 智能卡 • Intruder system 入侵者系统 • Point of Sales System 销售点系统 • Power Amplifier 功率放大器 • DC-DC Power Converter DC-DC 电源转换器 • Engine Controllers 发动机控制器 • Welding Machine Inverter 焊机逆变器 • Motor Drivers for Conveyor 输送机的电机驱动器 • Fan Motor Control Board 风扇电机控制板 • Computer Numerical Control (CNC) Control Board - 计算机数控( CNC )控制板 • Main power supplies for LED street lighting LED 路灯的主电源 • Modules for renewable energy generation, transmission and conversion 可再生能源发电、传输和转换模块 • Inverter Control Unit 逆变器控制单元 • EV Charging Pile Control Board 电动汽车充电桩控制板 • Optical Fingerprints for Biometric security 实现生物识别安全的光学指纹 • Power distribution unit for EV charging station 电动汽车充电站的配电装置

行业和供应链管理无人机
无人机用于行业和供应链管理,这项工作旨在表明,使用一群无人驾驶飞机(UAVS)在室内与人类一起使用是可行且安全的。无人机越来越多地集成在行业4.0框架下。无人机群主要在户外部署在民用和军事应用中,但是在制造和供应链管理中使用它们的机会是巨大的。对无人机技术(例如本地化,控制和计算机愿景)进行了广泛的研究,但对无人机在行业中实际应用的研究较少。无人机技术可以改善数据收集和监视,增强物联网框架中的决策,并在行业中自动化时间耗时和冗余的任务。但是,无人机的技术发展与它们整合到供应链之间存在差距。因此,这项工作着重于自动运输包裹的任务,该任务是利用与人一起运行的一群小型无人机进行自动化的任务。MOCAP系统,ROS和Unity用于本地化,过程间通信和可视化。在像环境这样的仓库中以徘徊和群模式在UAV上进行多个实验。关键字:(无人机群,仓库,运输,物流,供应链,行业4.0)1。简介
基于DAG 和AHP-TOPSIS 算法的多乘员协同任务分配方法研究
等方面 . 人机功能分配主要包括静态和动态两种类型 , 静态功能分配是从功能特性和需求分析入手 , 通过比较人 和系统在完成该功能上的能力优势或绩效优劣 , 决定该功能分配给人还是系统 . 动态功能分配方法则是在静态 人机功能分配的基础上 , 当动态触发机制响应时 , 允许系统在运行阶段根据情况的变化将功能在人与系统之间 动态地重新分配 , 提高整体的工作效率 . 多智能体的任务分配是指在作战开始前 , 指挥中心通常会根据已掌握的 战场信息 , 对己方作战单元进行任务预分配 . 但随着战场情景变化以及突发情况的出现 , 预分配方案可能会使得 执行任务的效能降低 , 多智能体如何调整自身任务 , 使得执行任务的效能保持最大是其研究的主要内容 . 计算机 任务调度研究的是将任务动态地调用给各个虚拟机并提供给用户使用 , 怎样合理地将任务分配给不同的虚拟机 , 进而提升整个系统的性能是其研究的重点 . 以上分配原则对于多乘员分配有很好的参考价值 , 但舱室乘员间任 务分配时 , 主要考虑到人的特性 , 需要以人的理论基础来加以研究 [4] . 针对实际作战过程中 , 乘员应对非预期事件效率低下的问题 , 本文提出了一种多乘员协同动态任务分配方 法 . 在非预期事件触发时 , 对任务进行 DAG 分解及分层 , 根据乘员脑力负荷、乘员能力、任务相关度以及时间成 本四个因素 , 按照一定的任务分配顺序 , 基于 AHP-TOPSIS 方法进行乘员的优选 , 实时更新乘员状态 , 并以此为 依据进行下一任务的分配 . 任务分配过程可实现随乘员状态变化而动态调整 , 达到负荷均衡、效能最优 , 从而将 多任务分配问题简化为单个任务的多属性决策问题 .

值得信赖的无人机关系:将模式动作世界分类法应用于无人机和无人机群歌剧
摘要 人为因素在航空电子系统的开发和集成中发挥着重要作用,以确保它们值得信赖并能有效使用。随着无人驾驶飞行器 (UAV) 技术对航空领域变得越来越重要,这一点也确实如此。本研究旨在通过利用流行的航空访谈方法(图式世界行动研究方法)结合从文献中确定的关于信任的关键问题,了解无人机操作员在驾驶无人机时的信任要求。对六名拥有不同经验的无人机操作员进行了访谈。这确定了过去的经验对信任的重要性以及操作员的期望。除了可以帮助开发值得信赖的系统的设备、程序和组织标准之外,还提出了针对培训以积累经验的建议。所开发的方法有望在人机交互中获得信任。

环境可持续性系统系统
摘要 - 系统系统中的环境可持续性(SOS)是一个新兴领域,旨在整合技术解决方案以促进自然资源的有效管理。系统的评论解决了智能城市(SOS类别)的可持续性,但一项系统的研究综合了对一般适用于SOS的环境可持续性知识的知识。尽管文献包括其他类型的可持续性,例如金融和社会,但本研究的重点是环境可持续性,分析了SOS如何促进可持续实践,例如降低碳排放,能源效率和生物多样性。我们进行了一项系统的映射研究,以确定可持续性,挑战和研究机会中SOS的应用领域。我们计划并执行了一项研究协议,包括对四个科学数据库的自动搜索。在926项研究中,我们检索了,我们选择,分析并报告了39项相关研究的结果。 我们的发现表明,大多数研究都集中在智能城市和智能电网上,而诸如可持续农业和预防野火等应用程序的探索较少。 我们确定了诸如系统互操作性,可伸缩性和数据治理等挑战。 最后,我们提出了SOS和环境可持续性的未来研究指示。 索引术语 - 系统系统,可持续性,自然源管理,智能生态系统,网络物理系统。在926项研究中,我们检索了,我们选择,分析并报告了39项相关研究的结果。我们的发现表明,大多数研究都集中在智能城市和智能电网上,而诸如可持续农业和预防野火等应用程序的探索较少。我们确定了诸如系统互操作性,可伸缩性和数据治理等挑战。最后,我们提出了SOS和环境可持续性的未来研究指示。索引术语 - 系统系统,可持续性,自然源管理,智能生态系统,网络物理系统。

值得信赖的无人机关系:将模式动作世界分类法应用于无人机和无人机群操作
摘要 人为因素在航空电子系统的开发和集成中发挥着重要作用,以确保它们值得信赖并能有效使用。随着无人驾驶飞行器 (UAV) 技术对航空领域变得越来越重要,这一点是正确的。本研究旨在通过利用流行的航空访谈方法(图式世界行动研究方法)结合从文献中确定的关于信任的关键问题,了解无人机操作员在驾驶无人机时的信任要求。采访了六名拥有不同经验的无人机操作员。这确定了过去的经验对信任的重要性以及操作员的期望。除了可以帮助开发值得信赖的系统的设备、程序和组织标准之外,还提出了针对培训以积累经验的建议。所开发的方法有望在人机交互中赢得信任。
系统
本手册实施 AFPD 11-2《飞行规则和程序》。作为联合部门出版物 (JDP),它将空军确定为 DoD NOTAM 系统的执行机构;描述该系统及其与联邦航空管理局 (FAA) 美国 NOTAM 系统 (USNS) 的关系;指导 DD 表格 2349《NOTAM 控制日志》的准备和使用;并规定美国空军 (USAF)、美国陆军 (USA) 和美国海军 (USN) 操作和使用该系统的指导、程序和责任。DoD NOTAM 系统向军事飞行员和飞行操作人员提供有关任何可能对飞行造成危险的航空设施、服务或程序的建立、状况或变化的信息。为确保军事摘要提供 NOTAM 覆盖的位置,请查看适用的 DMA 飞行信息出版物 (FLIP) 航路补充。
系统
本手册实施 AFPD 11-2《飞行规则和程序》。作为联合部门出版物 (JDP),它将空军确定为 DoD NOTAM 系统的执行机构;描述该系统及其与联邦航空管理局 (FAA) 美国 NOTAM 系统 (USNS) 的关系;指导 DD 表格 2349《NOTAM 控制日志》的准备和使用;并规定美国空军 (USAF)、美国陆军 (USA) 和美国海军 (USN) 操作和使用该系统的指导、程序和责任。DoD NOTAM 系统向军事飞行员和飞行操作人员提供有关任何可能对飞行造成危险的航空设施、服务或程序的建立、状况或变化的信息。为确保军事摘要提供 NOTAM 覆盖的位置,请查看适用的 DMA 飞行信息出版物 (FLIP) 航路补充。