XiaoMi-AI文件搜索系统
World File Search System检查程序

无人机在飞机检查中的应用
本文进一步扩展了无人机在飞行前和飞行后飞机目视检查中的应用研究问题。飞行前检查程序由飞机维修认证人员或机组人员在飞行前完成。所有类别的飞机的流程都相似,但具体类型的飞机的实施方式有所不同。因此,本文仅讨论小型训练飞机,该飞机将用于验证无人机 (UAV) 在正常运行中的使用情况。它识别并定义了在集群中使用多架无人机的问题以及它们在飞机运行的标准活动中的使用情况。结果应该是减少人为因素导致的可能故障数量,从而影响运行安全。同样重要的事实是希望尽量减少进行飞行前检查过程所需的时间,这将提高飞机运行效率的最终指标。
FSF ALAR 简报 5.2 — 地形 | 飞行安全基金会
美国联邦航空管理局 (FAA)。联邦航空法规 (FAR)。91.3“机长的责任和权限”,91.119“最低安全高度:一般规定”,91.121“高度计设置”,91.123“遵守空中交通管制的许可和指示”,91.155“基本目视飞行规则最低天气要求”,91.157“特殊目视飞行规则最低天气要求”,91.175“在仪表飞行规则下起飞和降落”,91.185“仪表飞行规则操作:双向无线电通信故障”,97“标准仪表进近程序,子部分 C – TERPS 程序”,121.97“机场:所需数据”,121.117“机场:所需数据”,121.135“内容”,121.315“驾驶舱检查程序”,121.443“机长资格:航线和机场”, 121.445“机长机场资格:特殊区域和机场”,121.542“飞行机组人员职责”。2000 年 1 月 1 日。

MIL-PRF-55110,刚性印刷线路板
附有详细的附录。附录 A 和 B 描述了制造商可以实施的两个产品保证计划。附录 A 包含传统的 QPL 产品保证计划。附录 B 是一种可选的质量管理方法,使用 MIL-PRF-31032 中提到的质量审查委员会概念来修改本规范中提供的通用验证标准。附录 C 提供统计抽样以及基本的测试和检查程序。附录 D 是可选的,可用于生产按照过时的设计标准设计的印刷线路板(见 6.4.1)。附录 D 也可用作根据附录 A 的测试和检查为旧设计或现有设计制定测试计划的指南。附录 E 是可选的,描述了用于评估可焊表面氧化水平的替代程序。该程序涉及使用电化学还原技术来确定镀通孔上的氧化物的类型和数量。
结构管理单位检查手册
北卡罗来纳州交通部 (NCDOT) 结构管理部门 (SMU) 负责州公路系统结构检查、负载能力分析、清点和管理维护政策和程序,包括但不限于桥梁、钢筋箱涵和直径为 54 英寸及更大的管道。联邦公路管理局 (FHWA) 已制定桥梁检查程序和评级指南,旨在在全国范围内实现统一性和一致性,并确保对新旧桥梁类型进行适当监控。现有结构的恶化和不断上升的更换成本使得必须对旧的现有桥梁进行适当的记录和分析,以便保持开放并保证公众的安全。NCDOT SMU 检查手册概述了检查、分析和清点职责,并在需要解决政策和程序时作为 SMU 人员和私人工程公司 (PEF) 的指南。
(营养师)实践路线图首次接触实践
缩写 全文 AfC 变革议程 AP 高级实践/高级从业者生物伦理学 生物伦理学是应用伦理学的一个分支,研究医学和生命科学中出现的哲学、社会和法律问题,特别是研究生物学和医学进步带来的伦理问题。 BDA 英国营养协会 CA125 癌抗原 125 CBD 病例讨论 CCG 临床委托小组 CEP 临床检查程序技能 COT 咨询观察工具 CPD 临床专业发展 CRP C 反应蛋白 CS 临床主管 CSP 特许物理治疗师协会 ECG 心电图 ESR 红细胞沉降率 FBC 全血细胞计数 FCP 首次接触从业者 FTE 全职当量 功能性肠病 (FBD)

放射解剖学
ب - كتب ملزمة • Hammer - 正常骨骼 • 约翰霍普金斯大学 - CTisUs • Medscape Reference - 肌肉骨骼放射学 • 纽约大学 - MSK 超声检查程序 • 诺福克和诺里奇大学医院 - 图像解释课程 • 加利福尼亚大学圣地亚哥分校 - 手部关节炎 • 加利福尼亚大学圣地亚哥分校 - 肌肉骨骼放射学体征图集 • 加利福尼亚大学圣地亚哥分校 - 肌肉骨骼放射科医生的互联网指南 • 加利福尼亚大学圣地亚哥分校 - 骨折的肌肉骨骼放射学 • 弗吉尼亚大学 - 颈椎影像评估 • 弗吉尼亚大学 - 骨骼创伤放射学 • 华盛顿大学 - 在线肌肉骨骼放射学书籍 • 华盛顿大学 - 骨科图集:骨科硬件在线图集 • 韦恩州立大学 - 骨科硬件
医疗保健专业服务计费指南
人工椎间盘置换术 ................................................................................................................................122 骨生长刺激剂 ................................................................................................................................122 骨形态发生蛋白 2 用于腰椎融合术 ............................................................................................122 骨形态发生蛋白 7 用于腰椎融合术 ............................................................................................123 颈椎融合术 .............................................................................................................................123 神经根病和脊髓病的颈椎手术 .............................................................................................................123 内窥镜检查程序 .............................................................................................................................124 骨骺 .............................................................................................................................................124 髋关节表面置换术 .............................................................................................................................124 股骨髋臼撞击综合征的髋关节手术 .............................................................................................124 骨关节炎的膝关节镜检查 .............................................................................................................124 微处理器控制的下肢假肢 .............................................................................................................125 骨软骨异体移植和自体移植...........................................................125 截骨重建 ................................................................................................................125 经皮椎体后凸成形术、椎体成形术和骶骨成形术 ..............................................................125 骶髂关节融合术 ................................................................................................................126 机器人辅助手术 ......................................................................................................................126 神经系统 ......................................................................................................................................126

ABO 高级考试复习
o 顺运动 o 逆运动 ▪ 视网膜镜检查程序 ▪ 患者 ▪ 视力表 ▪ 折射仪/综合验光仪 ▪ 工作距离 ▪ 截距 ▪ 球镜/柱镜 ▪ 验证中性 ▪ 设置 ▪ 将患者置于综合验光仪后面 ▪ 看图表(不要看光线,不要看近处的任何物体,包括验光师) ▪ 与患者保持距离 ▪ 来回照射眼睛并观察反射 ▪ 截距 ▪ 在您正在中和的子午线对面划线 ▪ 顺运动:眼睛的负度数太多,增加正度数 ▪ 逆运动:眼睛的正度数太多,增加负度数 ▪ 光线超出瞳孔 ▪ 如果没有散光或不在轴上,则与反射对齐 ▪ 球镜/柱镜 ▪ 分别中和每个子午线 ▪ 验证中性 ▪ 中和后瞳孔充满光线。 ▪ 为了验证▪ 远离患者,您应该看到逆向运动。 ▪ 主观验光:起点

伦敦LSE夏季
表明了课程是如何转移回IU的。请访问伦敦LSE暑期学校网站,以获取最新的课程。•学生应向ksabroad@indiana.edu询问商业信用。对于凯利(Kelley)大满贯,请直接联系凯利国际计划办公室,以获得特定于商业的等效性。•未分配的100级(-os 100)课程尚未由IUB部门评估。具有100范围等效的课程将用于毕业生的总体学分。但是,学生可以在出国留学之前或之后对该部门提交课程材料,以评估特定的学分。•如果将课程列为OS200/300/400,则该课程已由学术部门评估。与学术部保持联系,以确定课程如何满足学位要求。•有些课程可能携带先决条件;确保检查程序的网站以确定资格。
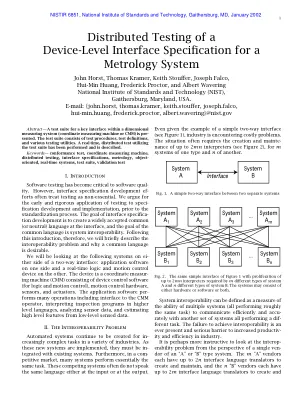
计量系统的设备级接口规范的分布式测试
软件测试已成为软件质量的关键。然而,接口规范开发工作通常将测试视为可有可无。我们主张在标准化过程之前,尽早并严格地将测试应用于规范开发和实施。接口规范开发的目标是在接口上创建一种被广泛接受的通用(或中性)语言,而通用语言的目标是系统互操作性。因此,在介绍之后,我们将简要描述互操作性问题以及为什么需要通用语言。我们将研究双向接口两侧的以下系统:一侧是应用软件,另一侧是实时逻辑和运动控制设备。该设备是坐标测量机 (CMM),由设备控制软件(用于逻辑和运动控制)、运动控制硬件、传感器和执行器组成。应用软件执行许多操作,包括与 CMM 操作员接口、以高级语言解释检查程序、分析传感器数据以及根据低级感测数据估计高级特征。